DT3 Manual
Edit this on GitLab
DT3 I/O Modules Discrete IO - Multichannel,Programmable Function Modules
Discrete Output, 4-Channel, High Current (to 2 A)
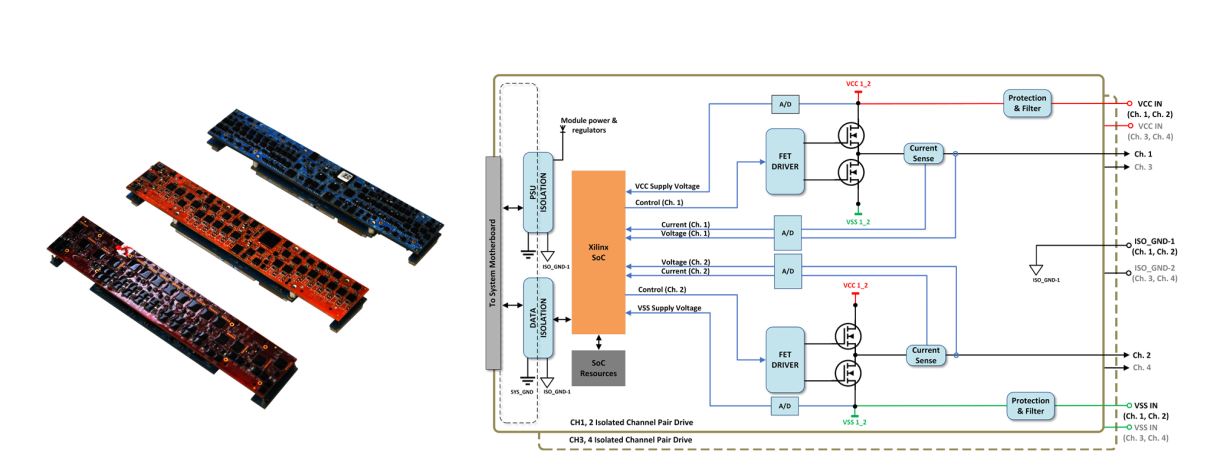
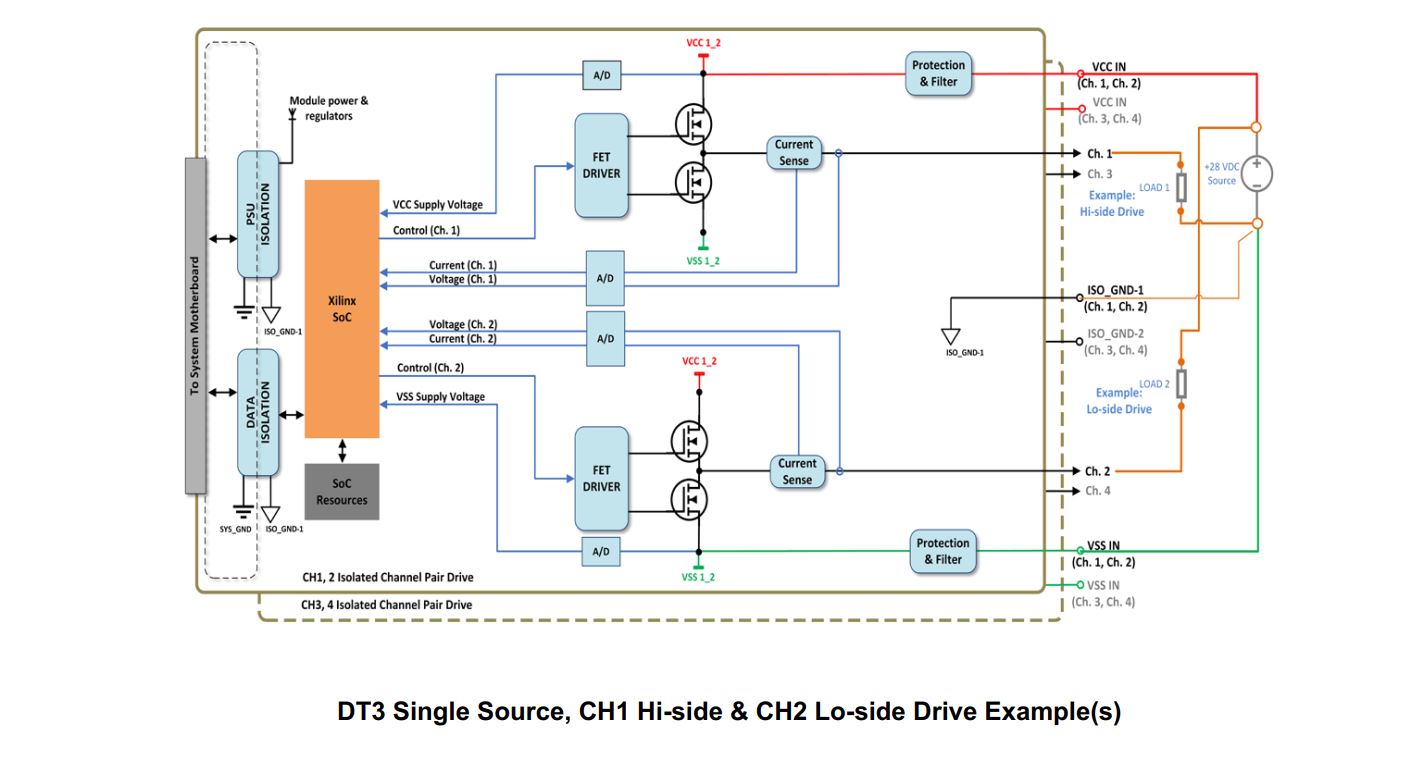
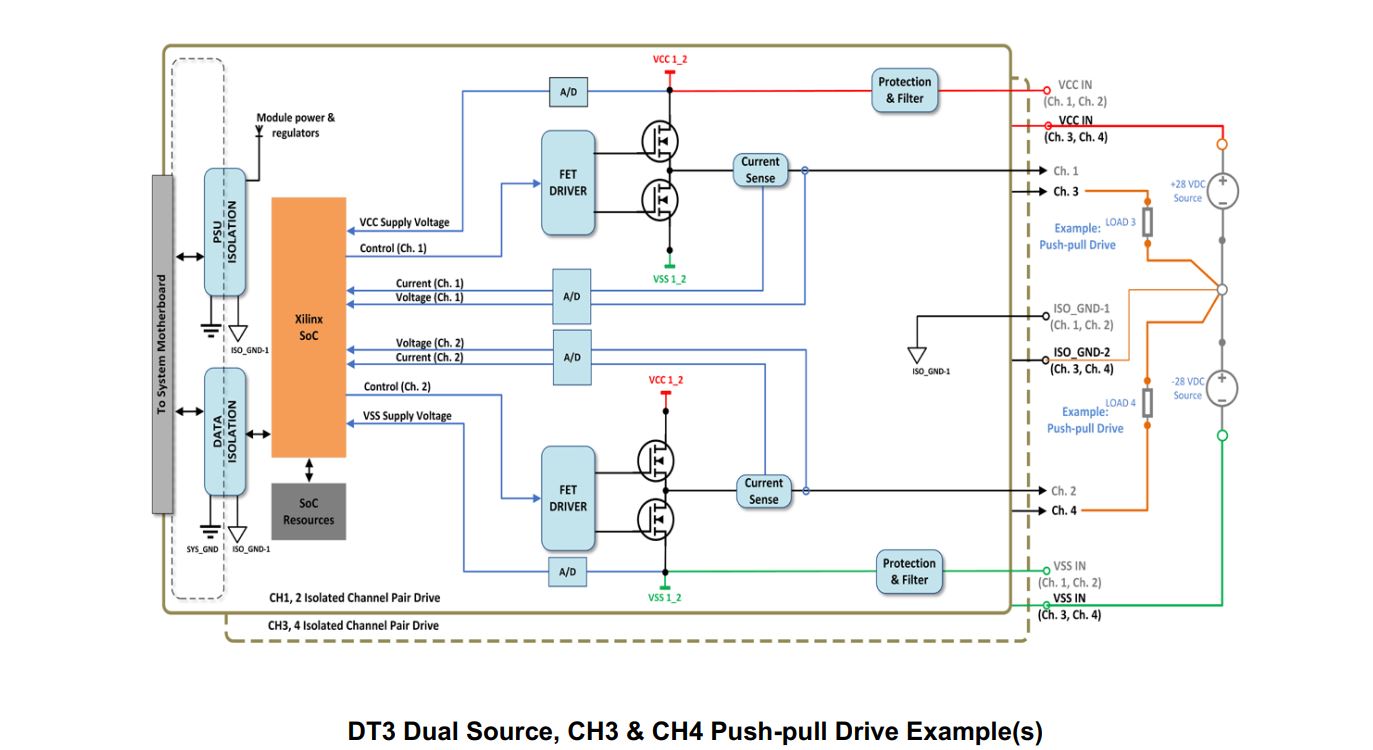
The DT3 provides four isolated, high current & voltage (up to 2 A, 65 VDC) discrete output switching channels. Arranged and power sourced in channel pairs, the individual module channel(s) can control and switch load outputs for either single or dual power supply applications. With a single source power supply (VCC & GND), the channel(s) can be connected to a load and provide either hi-side (current source) or lo-side (current sink) discrete load current switching. With dual power supply sources (VCC & VSS), the channel(s) can be connected to a load to provide push-pull discrete load current switching (dual source current switching from both a positive and negative power supply).
Features
Discrete Output 4 isolated, independent channels Paired VCC and VSS Source Inputs High Current Switching 2 A (max), load dependent High Input Voltage Power Supply Range ±5 to ±35 VDC (VCC & VSS dual source) 5 to 65 VDC (VCC single source)
Discrete Mode Functions PUSH-PULL Output commands; current source or sink PWM Output command PWM Continuous or Burst modes (n-times) Up to 500 kHz maximum OFF command = channel tri-state, high-Z
Standard NAI COSA Smart Function SerDes Interface (to motherboard) Standard I/O (32) pinout set
Built-in Test & Functions Input & Output Voltage measurements Output Current measurements Over-current protection/status
Specifications
ID/Type |
High-current, individual, discrete isolated current switches; DT3: 4-Channel (2-channels are paired and share VCC/VSS power supply source inputs) |
||
Voltage Range: |
±5 to ±35 VDC / Channel max. (external supplied dual source VCC & VSS); 5 to 65 VDC / Channel max. (external supplied single source VCC & GND); Note:Channel pair power input sources are/must be referenced to the channel pair ISO_GND |
||
Overvoltage Surge Protection |
75 VDC max. (clamped) |
||
Output Mode Formats (programmable per channel) |
Mode 0: Standard mode. User has two registers: “Drive Output H/L/T” and“Output Format”. Mode 1: PWM mode. PWM Output command; PWMContinuous or Burst modes (n-times) |
||
Channel Off (tristate) |
High-Z (>2 MΩ) |
||
Output Current |
2 A per channel, maximum |
||
Output Impedance |
<0.1 Ω |
System Protection |
|
All output(s) are set to “OFF” (at Power-ON and reset). No voltage transients on power-on or power-off. |
Load & Channel Protection |
||
Short circuit protected. Channel shuts “off” and a flag is set when current exceeds 10% maximum current rating > 50ms. Channel over-current reset by control/status register command. |
Switching Frequency |
||
Up to 350 kHz maximum (for PWM mode). |
+VCC & -VSS Voltage Measurement |
||
User can read source voltage(s). Voltage: LSB = 100 mV; Accuracy: ±1V |
Output Voltage Measurement |
||
User can read voltage of each channel. Voltage: LSB = 100 mV; Accuracy:±300 mV |
Output Current Measurement |
||
User can read current of each channel. Current: LSB = 1 mA; Accuracy: ±20 mA |
Isolation |
||
Module power source (ISO-GND) and I/O to system ground is ≥500 VDC |
Power |
||
5 VDC / 105 mA (max) (does not include source powered load) |
Weight |
||
1.5 oz. (42 g) |
PWM Output Mode Operation |
Specifications (Continued)
Example Applications
abc
Architected for Versatility
Edit this on GitLab
NAI’s Custom-On-Standard Architecture™ (COSA®) offers a choice of over 40 Intelligent I/O, communications, or Ethernet switch functions, providing the highest packaging density and greatest flexibility of any 3U SBC in the industry. Preexisting, fully-tested functions can be combined in an unlimited number of ways quickly and easily.
Board Support Package and Software Support
The 75PPC1 includes BSP and SDK support for Wind River® VxWorks®. In addition, software support kits are supplied, with source code and board-specific library I/O APIs, to facilitate system integration. Each I/O function has dedicated processing, unburdening the SBC from unnecessary data management overhead.
Background Built-In-Test (BIT)
BIT continuously monitors the status of all I/O during normal operations and is totally transparent to the user. SBC resources are not consumed while executing BIT routines. This simplifies maintenance, assures operational readiness, reduces life-cycle costs and— keeps your systems mission ready.
One-Source Efficiencies
Eliminate man-months of integration with a configured, field-proven system from NAI. Specification to deployment is a seamless experience as all design, state-of-the-art manufacturing, assembly and test are performed— by one trusted source. All facilities are in the U.S. and optimized for high-mix/low volume production runs and extended lifecycle support.
Product Lifecycle Management
From design-in to production, and beyond, NAI’s product lifecycle management strategy ensures the long-term availability of COTS products through configuration management, technology refresh, and obsolescence component purchase and storage.
INTRODUCTION
As a leading manufacturer of smart function modules, NAI offers over 100 different modules that cover a wide range of I/O, measurements and simulation, communications, Ethernet switch, and SBC functions. Our DT3 Discrete Output smart function module provides four isolated, high current and voltage (up to 2 A, 65 VDC) discrete output switching channels that can control and switch load outputs for either single or dual power supply applications. This user manual is designed to help you get the most out of our discrete I/O smart function modules.
DT3 Overview
NAI’s DT3 module offers a range of features designed to suit a variety of system requirements, including:
Four (4) Isolated, Independent Channels: The DT3 module provides four separate channels, each equipped with paired VCC and VSS source inputs, ensuring precise and independent control.
High Current Switching: With a maximum current rating of 2A (load dependent), the DT3 module is capable of high current switching, making it suitable for a wide range of applications.
High Input Voltage Power Supply Range: The module supports a versatile power supply range, accommodating various voltage requirements:
-
With VCC & VSS dual source inputs, the DT3 accepts a wide range of input voltages from ±5 to ±35 VDC.
-
With a VCC single source input, the input voltage range extends from 5 to 65 VDC.
This power supply range versatility ensures compatibility with your specific setup.
Push-Pull Output Commands: Users can configure the DT3 module to operating in push-pull mode, enabling both current sourcing and sinking capabilities for increased operational flexibility.
Individual PWM Output Commands: The DT3 module offers individual Pulse Width Modulation (PWM) output commands with options for continuous or burst modes, allowing for the generation of precise PWM signals tailored to the user’s application needs.
Standard NAI COSA®: The module features a SerDes interface for seamless communication with the motherboard. With its standard 32-pin I/O pinout set, integration into existing systems is straightforward.
Built-In Test & Functions: The DT3 module comes equipped with built-in test and diagnostic functions, including:
-
Built-in capabilities for measuring input and output voltages, providing valuable diagnostic information.
-
Ability to monitor output currents to ensure the module is operating within specified limit.
-
Over-current protection, providing status information to prevent damage and ensure reliable operation.
These features make the monitoring and maintenance of the user’s system performance easier.
PRINCIPLE OF OPERATION
The DT3 provides 4 independent, isolated, high current (up to 2 A per channel) and voltage (±65 V for a single source power supply, ±35 V for a dual source power supply). This module includes diode clamping on each channel. Clamping is useful for inductive loads, such as relays and short circuit protection.
The 4 channels are galvanically isolated in pairs (VCC1/VSS1 for Ch.1/2, VCC2/VSS2 for Ch.3/4) from both system ground and from each other. With a single source power supply (VCC & GND), the channel(s) can connect to a load to provide high-side (current source) or low-side (current sink) discrete load current switching. With dual power supply sources (VCC and VSS), the channel(s) can connect to a load to provide push-pull discrete load current switching (dual source current switching from both a positive and negative power supply) with three states: drive high (VCC), drive low (VSS) or tristate (high-impedance). Current and Voltage measurements are available as both instantaneous (sampled) and averaged (RMS).
This module provides an automatic background built-in-test (BIT) for each channel. The BIT functions are always enabled and continually check that each channel is functioning properly.
The module design utilizes state of the art galvanic isolation that is superior to alternatives such as optocoupler devices. The galvanic isolation eliminates typical optocoupler design concerns such as uncertain current transfer ratios, nonlinear transfer functions and temperature/lifetime degradation effects.
Channel Interface
Each channel contains a dual n-channel MOSFET pair configured as an isolated solid-state relay (SSR). The SSR is energized so both AC and DC current can flow through the channels I/O pins. The MOSFET presents a low ~7mΩ on-impedance. The module contains circuitry to measure the current through, and the voltage present on the output pins.
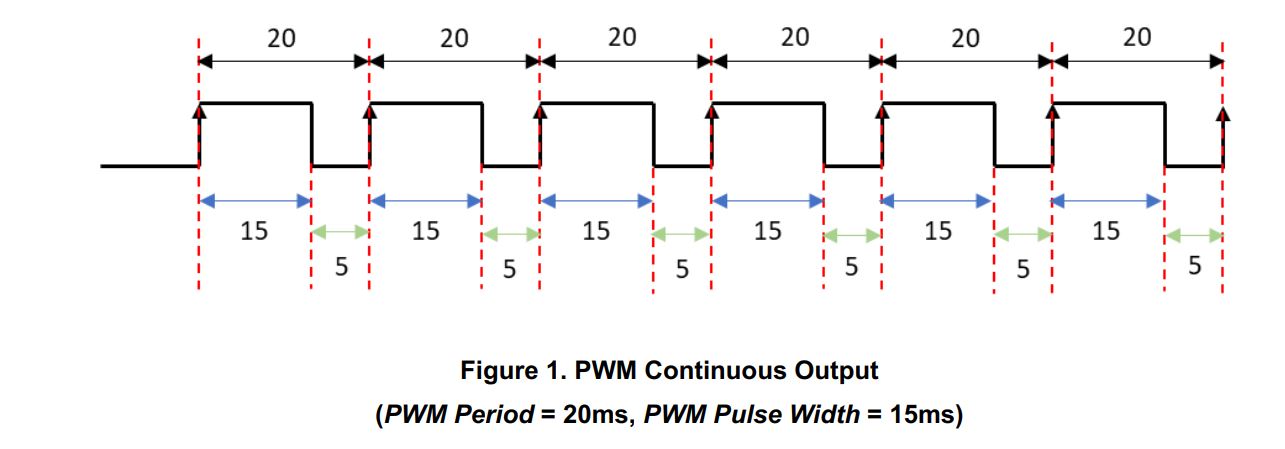
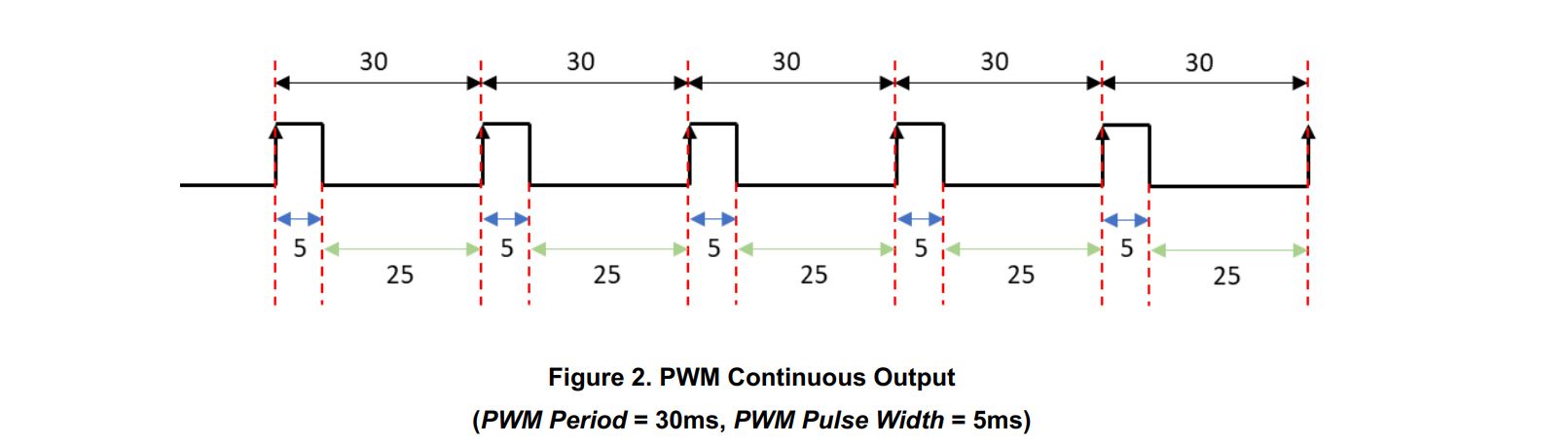
PWM Output
There are two PWM output modes: continuous PWM and burst PWM. The PWM output is precise with low jitter. In PWM output mode, the PWM Burst Count register value determines whether the output will be a continuous or burst output. The value written to the PWM Period register specifies the period of the PWM output. The value written to the PWM Pulse Width register specifies the time in which the output will be driven 'high' (VCC), while the remainder of the period will be driven 'low' (VSS). For PWM Burst mode, a value greater than zero in the PWM Burst Count register specifies the number of cycles that will appear on the output when triggered.
Continuous PWM
Figure 1 and Figure 2 illustrate examples of continuous PWM outputs. The configured PWM output is enabled and disabled with the PWM Enable register.
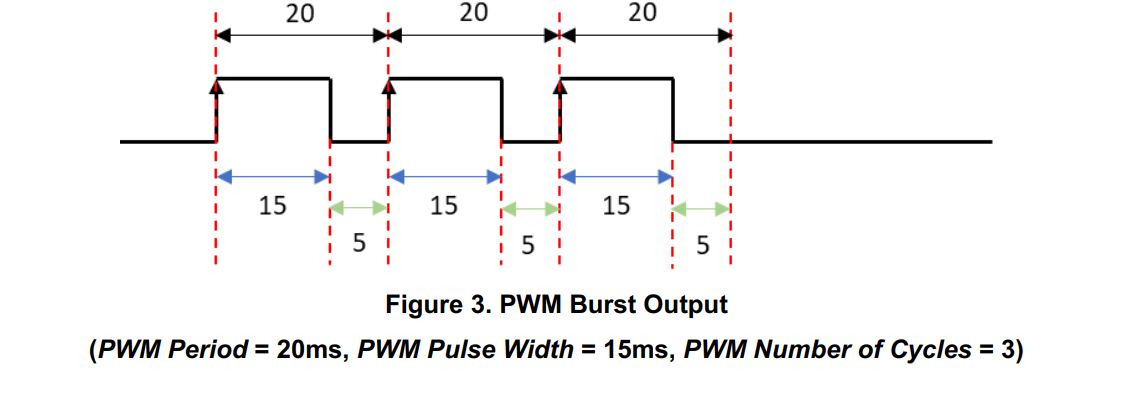
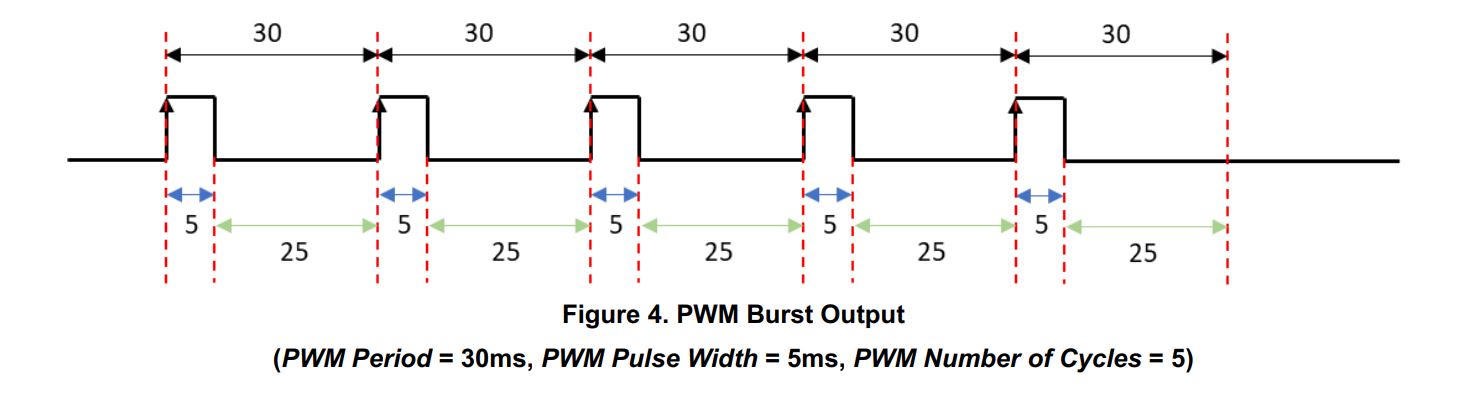
PWM Burst
Figure 3 and Figure 4 illustrate examples of PWM burst outputs. The configured PWM output is enabled with the PWM Enable register. After the number of pulses that were requested is outputted, the value in the PWM Enable register will be reset (self-clearing) to allow for the output to be re-enabled.
Automatic Background Built-In Test (BIT)/Diagnostic Capability
The discrete module supports automatic background BIT testing that verifies channel health. The testing is transparent to the user, requires no external programming, and has no effect on the operation of the module. The background BIT (D2) checks the voltage at the output pin and compares that value with the VCC voltage (when driving high) or VSS voltage (when driving low). The compared values must match within a range of ±1 V. If they do not, a BIT fault will be set. The results of the tests are stored in the BIT Dynamic Status and BIT Latched Status registers.
The technique used by the continuous background BIT (CBIT) test consists of an “add-2, subtract-1” counting scheme. The BIT counter is incremented by 2 when a BIT-fault is detected and decremented by 1 when there is no BIT fault detected and the BIT counter is greater than 0. When the BIT counter exceeds the (programmed) Background BIT Threshold value, the specific channel’s fault bit in the BIT status register will be set. Note, the interval at which BIT is performed is dependent and differs between module types. Rather than specifying the BIT Threshold as a “count”, the BIT Threshold is specified as a time in milliseconds. The module will convert the time specified to the BIT Threshold “count” based on the BIT interval for that module. The “add-2, subtract-1” counting scheme effectively filters momentary or intermittent anomalies by allowing them to “come and go“ before a BIT fault status or indication is flagged (e.g. BIT faults would register when sustained; i.e. at a ten second interval, not a 10-millisecond interval). This prevents spurious faults from registering valid such as those caused by EMI and/or dirty power causing false BIT faults. Putting more “weight” on errors (“add-2”) and less “weight” on subsequent passing results (subtract-1) will result in a BIT failure indication even if a channel “oscillates” between a pass and fail state.
In addition to BIT, the discrete module tests for overcurrent conditions, VCC/VSS undervoltage, VCC/VSS overvoltage, VCC/VSS surge suppressor fault, and FET driver overtemperature.
User Watchdog Timer Capability
The Discrete Output Function Module provides registers that support User Watchdog Timer Capability. Refer to “User Watchdog Timer Module Manual” for the Principle of Operation description.
Module Common Registers
The Discrete Output Function Module includes module common registers that provide access to module-level bare metal/FPGA revisions & compile times, unique serial number information, and temperature/voltage/current monitoring. Refer to “Module Common Registers Module Manual” for the detailed information.
REGISTER DESCRIPTIONS
The register descriptions provide the register name, Type, Data Range, Read or Write information, Initialized Value, a description of the function and, in most cases, a data table.
Discrete Output Registers
Each channel can be configured for either commanded output or PWM mode. The PWM Period, PWM Pulse Width, and PWM Burst Count registers configure the PWM output characteristics. The Drive Output High/Low/Tristate register drives the output based on the configured Output Format, and the Output Format register configures the output drivers for each channel.
Output Mode
Function: Sets how the output is controlled for each channel.
Type: unsigned binary word (32-bit)
Data Range: 0x0000 0000 to 0x0000 000F
Read/Write: R/W
Initialized Value: 0
Operational Settings: Write a 0 to set the channel for user commanded output (output state is controlled by the Drive Output High/Low/Tristate register). Write a 1 to set the channel for PWM mode. Bit-mapped per channel.
|
Note
|
for both output command and PWM modes, the Output Format register takes priority if the output is set to high-impedance. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D |
D |
D |
D |
PWM Period
Function: When Output Mode is set for PWM mode, the value in the PWM Period register is used as the time interval for the PWM output.
Type: unsigned binary word (32-bit)
Data Range: 0x0000 0000 to 0xFFFF FFFF
Read/Write: R/W
Initialized Value: N/A
Operational Settings: Set the PWM Period (LSB = 8 ns). The PWM Period must be greater than the value set in the PWM Pulse Width register.
PWM Pulse Width
Function: When Output Mode is set for PWM mode, the value in the PWM Pulse Width register is used as the time interval of “drive high (VCC)” for the PWM output.
Type: unsigned binary word (32-bit)
Data Range: 0x0000 0000 to 0xFFFF FFFF
Read/Write: R/W
Initialized Value: N/A
Operational Settings: Set the PWM Pulse Width (LSB = 8 ns). The PWM Pulse Width must be less than the value set in the PWM Period register.
Drive Output High/Low/Tristate
Function: Drives the output based on the configured Output Format.
Type: unsigned binary word (32-bit)
Data Range: 0x0000 0000 to 0x0000 000F
Read/Write: R/W
Initialized Value: 0x0000 0000
Operational Settings: See below table for complete list of settings. Bit-mapped per channel.
Off (Tristate/High-Z) |
No effect |
Low-side drive |
1 to tristate, 0 to drive output low (Vss) |
High-side drive |
1 to drive output high (Vcc), 0 to tristate |
Push-pull |
1 to drive output high (Vcc), 0 to drive output low (Vss) |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D |
D |
D |
D |
Output Format
Function: Configures the output drivers for channels 1-4.
Type: unsigned binary word (32-bit)
Data Range: 0x0000 0000 to 0x0000 00FF
Read/Write: R/W
Initialized Value: 0
Operational Settings: Write integer 0 for Off (Tristate/High-Z); 1, 2, or 3 for specific output format.
Integer |
DH |
DL |
(2 bits per channel) |
0 |
0 |
0 |
Off (Tristate/High-Z) |
1 |
0 |
1 |
Low-side drive |
2 |
1 |
0 |
High-side drive |
3 |
1 |
1 |
Push-pull |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Ch4 |
Ch4 |
Ch3 |
Ch3 |
Ch2 |
Ch2 |
Ch1 |
Ch1 |
PWM Enable
Function: Enables the PWM output (Output Mode register for the channel must be set for PWM mode).
Type: unsigned binary word (32-bit)
Data Range: 0x0000 0000 to 0x0000 000F
Read/Write: R/W
Initialized Value: 0x0000 0000
Operational Settings: Write a 1 to enable PWM output. If a burst count greater than zero is programmed, the bit will clear once the number of cycles has completed. Bit-mapped per channel.
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D |
D |
D |
D |
PWM Burst Count
Function: Sets the PWM number of cycles for burst mode.
Type: unsigned binary word (32-bit)
Data Range: 0x0000 0000 to 0xFFFF FFFF
Read/Write: R/W
Initialized Value: 0 (continuous mode)
Operational Settings: Set the number of times to output the PWM signal. Set to 0 for continuous mode.
Discrete Output Control Registers
The discrete output control registers provide the ability to specify the configuration of the bridge mode and the maximum/minimum voltage values for the VCC and VSS supplies. The discrete output channels are monitored to detect overcurrent conditions and will automatically disable the discrete output (set to high-impedance). In the event of an overcurrent condition, the discrete channel needs to be ‘reset' by writing to the Overcurrent Reset register (the channel will also enter tristate mode upon detection of an overcurrent condition). The discrete Current Limit register provides the ability to set or change the threshold for overcurrent detection for each channel.
Full Bridge Enable
Function: Sets the channel pairs for half-bridge or full-bridge mode.
Type: unsigned binary word (32-bit)
Data Range: 0x0000 0000 to 0x0000 0003
Read/Write: R/W
Initialized Value: 0 (half-bridge for all channels)
Operational Settings: Write a 0 to set the channel for half-bridge mode. Write a 1 to set the channel for full-bridge mode. Bit-mapped per VCC/VSS bank.
|
Note
|
When D0 Bit is set to 1, channels 1 and 2 operate as a full-bridge; when D1 Bit is set to 1, channels 3 and 4 operate as a full-bridge. |
|
Note
|
When full-bridge mode is enabled, both channels in the pair MUST be configured to push-pull in Output Format, otherwise the channels in the pair will continue to operate as half-bridge. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D |
D |
Current Limit
Function: Sets the overcurrent threshold for each channel.
Type: unsigned binary word (32-bit)
Data Range: 0x0000 0000 to 0x0000 0898 (0 to 2.2A)
Enable Floating Point Mode: 0 (Integer Mode)
Signed 32-bit value representing milliamps. LSB = 1mA.
Enable Floating Point Mode: 1 (Floating Point Mode) Single Precision
Floating Point Value (IEEE-754) in amps.
Read/Write: R/W
Initialized Value: 0x898 (2.2A)
Operational Settings: This setting is the value that is used for the overcurrent threshold for each channel. This value is applied to both positive and negative currents.
|
Note
|
The maximum value for the Current Limit is 2.2A (the maximum continuous current is 2A, but it is recommended that the threshold be programmed to an additional 10%, which equals 2.2A). |
Overcurrent Reset
Function: Resets tri-stated channels in Overcurrent Latched Status register following an overcurrent condition as measured by the Drive Current Measured register.
Type: unsigned binary word (32-bit)
Data Range: 0x0000 0000 to 0x0000 000F
Read/Write: W
Initialized Value: 0
Operational Settings: 1 is written to reset disabled channels. Processor will write a 0 back to the Overcurrent Reset register when reset process is complete.
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Ch4 |
Ch3 |
Ch2 |
Ch1 |
VCC Minimum Voltage Value
Function: Sets the threshold for the minimum VCC supply voltage. If the measured voltage drops below this value, the status bit for VCC Undervoltage will be set.
Type: signed binary word (32-bit) or Single Precision Floating Point Value (IEEE-754) (Floating Point Mode)
Data Range: 0xFFFF FD76 to 0x0000 028A (-65.0V to +65.0V)
Enable Floating Point Mode: 0 (Integer Mode)
Signed 32-bit value representing volts. LSB = 100mV.
Enable Floating Point Mode: 1 (Floating Point Mode)
Single Precision Floating Point Value (IEEE-754) in volts.
Read/Write: R/W
Initialized Value: 0x104 (+26.0V)
Operational Settings: This register only affects when the status bit is set, the drive will not be disabled by this threshold.
VCC Maximum Voltage Value
Function: Sets the threshold for the maximum VCC supply voltage. If the measured voltage rises above this value, the status bit for power VCC Overvoltage will be set.
Type: signed binary word (32-bit) or Single Precision Floating Point Value (IEEE-754) (Floating Point Mode)
Data Range: 0xFFFF FD76 to 0x0000 028A (-65.0V to +65.0V)
Enable Floating Point Mode: 0 (Integer Mode)
Signed 32-bit value representing volts. LSB = 100mV.
Enable Floating Point Mode: 1 (Floating Point Mode)
Single Precision Floating Point Value (IEEE-754) in volts.
Read/Write: R/W
Initialized Value: 0x12C (+30.0V)
Operational Settings: This register only affects when the status bit is set, the drive will not be disabled by this threshold.
VSS Minimum Voltage Value
Function: Sets the threshold for the minimum VSS supply voltage. If the measured voltage drops below this value, the status bit for VSS Undervoltage will be set.
Type: signed binary word (32-bit) or Single Precision Floating Point Value (IEEE-754) (Floating Point Mode)
Data Range: 0xFFFF FD76 to 0x0000 028A (-65.0V to +65.0V)
Enable Floating Point Mode: 0 (Integer Mode)
Signed 32-bit value representing volts. LSB = 10 mV.
Enable Floating Point Mode: 1 (Floating Point Mode)
Single Precision Floating Point Value (IEEE-754) in volts.
Read/Write: R/W
Initialized Value: 0xFFFF FF38 (-2.0V)
Operational Settings: This register only affects when the status bit is set, the drive will not be disabled by this threshold.
VSS Maximum Voltage Value
Function: Sets the threshold for the maximum VSS supply voltage. If the measured voltage rises above this value, the status bit for VSS Overvoltage will be set.
Type: signed binary word (32-bit) or Single Precision Floating Point Value (IEEE-754) (Floating Point Mode)
Data Range: 0xFFFF FD76 to 0x0000 028A (-65.0V to +65.0V)
Enable Floating Point Mode: 0 (Integer Mode)
Signed 32-bit value representing volts. LSB = 100mV.
Enable Floating Point Mode: 1 (Floating Point Mode)
Single Precision Floating Point Value (IEEE-754) in volts.
Read/Write: R/W
Initialized Value: 0xC8 (+2.0V)
Operational Settings: This register only affects when the status bit is set, the drive will not be disabled by this threshold.
Discrete Output Measurement Registers
The measured voltage and current for the discrete output and the supply, as well as the drive temperature, can be read for each discrete channel.
Drive Voltage (Sampled)
Function: Reads actual voltage at the output pin per individual channel.
Type: signed binary word (32-bit)
Data Range: 0xFFFF FD76 to 0x0000 028A (-65.0V to +65.0V)
Enable Floating Point Mode: 0 (Integer Mode)
Signed 32-bit value representing volts. LSB = 100mV.
Enable Floating Point Mode: 1 (Floating Point Mode)
Single Precision Floating Point Value (IEEE-754) in volts.
Read/Write: R
Initialized Value: Updated by module as per conditions
Operational Settings: Value is a signed binary 32-bit word, where LSB = 100mV. Data is read as 2’s complement number. For example, if output voltage word is 0x00F0 (240d), actual voltage is 24.0V.
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
Drive Voltage (RMS)
Function: Reads averaged RMS voltage at output pin per individual channel.
Type: signed binary word (32-bit)
Data Range: 0x0000 0000 to 0x0000 028A (0.0V to 65.0V)
Enable Floating Point Mode: 0 (Integer Mode)
Signed 32-bit value representing volts. LSB = 100mV.
Enable Floating Point Mode: 1 (Floating Point Mode)
Single Precision Floating Point Value (IEEE-754) in volts.
Read/Write: R
Initialized Value: Updated by module as per conditions
Operational Settings: Value is a signed binary 32-bit word, where LSB = 100mV. Data is read as 2’s complement number. For example, if output voltage word is 0x00F0 (240d), actual voltage is 24.0V.
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
Drive Current (Sampled)
Function: Reads the output current through the output pin per individual channel.
Type: signed binary word (32-bit)
Data Range: 0xFFFF F768 to 0x0000 0898 (-2.2A to 2.2A)
Enable Floating Point Mode: 0 (Integer Mode)
Signed 32-bit value representing milliamps. LSB = 1mA.
Enable Floating Point Mode: 1 (Floating Point Mode)
Single Precision Floating Point Value (IEEE-754) in amps.
Read/Write: R
Initialized Value: Updated by module as per conditions
Operational Settings: Value is a signed binary 32-bit word, where LSB = 1mA. Data is read as 2’s complement number. For example, if output current word is 0x0064 (100d), actual current is 100mA.
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
Drive Current (RMS)
Function: Reads averaged RMS output current through the output pin per individual channel.
Type: signed binary word (32-bit)
Data Range: 0x0000 0000 to 0x0000 0898 (0.0A to 2.2A)
Enable Floating Point Mode: 0 (Integer Mode)
Signed 32-bit value representing milliamps. LSB = 1mA.
Enable Floating Point Mode: 1 (Floating Point Mode)
Single Precision Floating Point Value (IEEE-754) in amps.
Read/Write: R
Initialized Value: Updated by module as per conditions
Operational Settings: Value is a signed binary 32-bit word, where LSB = 1 mA. Data is read as 2’s complement number. For example, if output current word is 0x0064 (100d), actual current is 100mA.
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
VCC Voltage Measured
Function: Measures the user-applied VCC voltage.
Type: unsigned binary word (32-bit) or Single Precision Floating Point Value (IEEE-754) (Floating Point Mode)
Data Range: 0xFFFF FD76 to 0x0000 028A (-65.0V to +65.0V)
Enable Floating Point Mode: 0 (Integer Mode)
Signed 32-bit value representing volts. LSB = 100mV.
Enable Floating Point Mode: 1 (Floating Point Mode)
Single Precision Floating Point Value (IEEE-754) in volts.
Read/Write: R
Initialized Value: N/A
Operational Settings: Value is a signed binary 32-bit word, where LSB = 100mV. Data is read as 2’s complement number. For example, if output voltage word is 0x00F0 (240d), actual voltage is 24.0V.
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
VCC Current Measured
Function: Measures the VCC power supply current.
Type: signed binary word (32-bit) or Single Precision Floating Point Value (IEEE-754) (Floating Point Mode)
Data Range: 0xFFFF F768 to 0x0000 0898 (-2.2A to 2.2A)
Enable Floating Point Mode: 0 (Integer Mode)
Signed 32-bit value representing milliamps. LSB = 1mA.
Enable Floating Point Mode: 1 (Floating Point Mode)
Single Precision Floating Point Value (IEEE-754) in amps.
Read/Write: R
Initialized Value: N/A
Operational Settings: Value is a signed binary 32-bit word, where LSB = 1 mA. Data is read as 2’s complement number. For example, if output current word is 0x0064 (100d), actual current is 100mA.
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
VSS Voltage Measured
Function: Measures the user-applied VSS voltage.
Type: unsigned binary word (32-bit) or Single Precision Floating Point Value (IEEE-754) (Floating Point Mode)
Data Range: 0xFFFF FD76 to 0x0000 028A (-65.0V to +65.0V)
Enable Floating Point Mode: 0 (Integer Mode)
Signed 32-bit value representing volts. LSB = 100mV.
Enable Floating Point Mode: 1 (Floating Point Mode)
Single Precision Floating Point Value (IEEE-754) in volts.
Read/Write: R
Initialized Value: N/A
Operational Settings: Value is a signed binary 32-bit word, where LSB = 100mV. Data is read as 2’s complement number. For example, if output voltage word is 0x00F0 (240d), actual voltage is 24.0V.
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
VSS Current Measured
Function: Measures the VSS power supply current.
Type: signed binary word (32-bit) or Single Precision Floating Point Value (IEEE-754) (Floating Point Mode)
Data Range: 0xFFFF F768 to 0x0000 0898 (-2.2A to 2.2A)
Enable Floating Point Mode: 0 (Integer Mode)
Signed 32-bit value representing milliamps. LSB = 1mA.
Enable Floating Point Mode: 1 (Floating Point Mode)
Single Precision Floating Point Value (IEEE-754) in amps.
Read/Write: R
Initialized Value: N/A
Value is a signed binary 32-bit word, where LSB = 1 mA. Data is read as 2’s complement number. For example, if output current word is 0x0064 (100d), actual current is 100mA.
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
D |
Driver Temperature
Function: Driver temperature near the FETs in degrees Celsius.
Type: signed binary word (32-bit) or Single Precision Floating Point Value (IEEE-754) (Floating Point Mode)
Data Range: N/A.
Enable Floating Point Mode: 0 (Integer Mode)
(2’s compliment signed 32-bit value) with LSB = 1°C
Enable Floating Point Mode: 1 (Floating Point Mode)
Single Precision Floating Point Value (IEEE-754) in degrees Celsius.
Read/Write: R
Initialized Value: N/A
Watchdog Timer Registers
Refer to 'Watchdog Timer Module Manual' for the Watchdog Timer register descriptions.
Module Common Registers
Refer to “Module Common Registers Module Manual” for the register descriptions.
Status and Interrupt Registers
The Discrete Output Function Module provides status registers for BIT, overcurrent, VCC/VSS undervoltage, VCC/VSS overvoltage, VCC/VSS surge suppressor fault, driver over-temperature and watchdog timer fault.
BIT Status
There are four registers associated with the BIT Status: Dynamic, Latched, Interrupt Enable, and Set Edge/Level Interrupt.
BIT Dynamic Status |
|||||||||||||||
BIT Latched Status |
|||||||||||||||
BIT Interrupt Enable |
|||||||||||||||
BIT Set Edge/Level Interrupt |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Ch4 |
Ch3 |
Ch2 |
Ch1 |
Function: Sets the corresponding bit associated with the channel’s BIT error.
Type: unsigned binary word (32-bit)
Data Range: 0x0000 0000 to 0x0000 000F
Read/Write: R (Dynamic), R/W (Latched, Interrupt Enable, Edge/Level Interrupt)
Initialized Value: 0
Overcurrent Status
There are four registers associated with the Overcurrent Status: Dynamic, Latched, Interrupt Enable, and Set Edge/Level Interrupt.
Overcurrent Dynamic Status |
|||||||||||||||
Overcurrent Latched Status |
|||||||||||||||
Overcurrent Interrupt Enable |
|||||||||||||||
Overcurrent Set Edge/Level Interrupt |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Ch4 |
Ch3 |
Ch2 |
Ch1 |
Function: Sets the corresponding bit associated with the channel’s Overcurrent error.
Type: unsigned binary word (32-bit)
Data Range: 0x0000 0000 to 0x0000 000F
Read/Write: R (Dynamic), R/W (Latched, Interrupt Enable, Edge/Level Interrupt)
Initialized Value: 0
VCC Undervoltage
There are four registers associated with the VCC Undervoltage Status: Dynamic, Latched, Interrupt Enable, and Set Edge/Level Interrupt.
VCC Undervoltage Dynamic Status |
|||||||||||||||
VCC Undervoltage Latched Status |
|||||||||||||||
VCC Undervoltage Interrupt Enable |
|||||||||||||||
VCC Undervoltage Set Edge/Level Interrupt |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Bank2 |
Bank1 |
Function: Sets the corresponding bit associated with the channel’s VCC Undervoltage error.
Type: unsigned binary word (32-bit)
Data Range: 0x0 to 0x3
Read/Write: R (Dynamic), R/W (Latched, Interrupt Enable, Edge/Level Interrupt)
Initialized Value: 0
VCC Overvoltage
There are four registers associated with the VCC Overvoltage Status: Dynamic, Latched, Interrupt Enable, and Set Edge/Level Interrupt.
VCC Overvoltage Dynamic Status |
|||||||||||||||
VCC Overvoltage Latched Status |
|||||||||||||||
VCC Overvoltage Interrupt Enable |
|||||||||||||||
VCC Overvoltage Set Edge/Level Interrupt |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Bank2 |
Bank1 |
Function: Sets the corresponding bit associated with the channel’s VCC Overvoltage error.
Type: unsigned binary word (32-bit)
Data Range: 0x0 to 0x3
Read/Write: R (Dynamic), R/W (Latched, Interrupt Enable, Edge/Level Interrupt)
Initialized Value: 0
VCC Surge Suppressor Fault
There are four registers associated with the VCC Surge Suppressor Fault Status: Dynamic, Latched, Interrupt Enable, and Set Edge/Level Interrupt.
VCC Surge Suppressor Fault Dynamic Status |
|||||||||||||||
VCC Surge Suppressor Fault Latched Status |
|||||||||||||||
VCC Surge Suppressor Fault Interrupt Enable |
|||||||||||||||
VCC Surge Suppressor Fault Set Edge/Level Interrupt |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Bank2 |
Bank1 |
Function: Sets the corresponding bit associated with the channel’s VCC Surge Suppressor fault error.
Type: unsigned binary word (32-bit)
Data Range: 0x0 to 0x3
Read/Write: R (Dynamic), R/W (Latched, Interrupt Enable, Edge/Level Interrupt)
Initialized Value: 0
VSS Undervoltage
There are four registers associated with the VSS Undervoltage Status: Dynamic, Latched, Interrupt Enable, and Set Edge/Level Interrupt.
VSS Undervoltage Dynamic Status |
|||||||||||||||
VSS Undervoltage Latched Status |
|||||||||||||||
VSS Undervoltage Interrupt Enable |
|||||||||||||||
VSS Undervoltage Set Edge/Level Interrupt |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Bank2 |
Bank1 |
Function: Sets the corresponding bit associated with the channel’s VSS Undervoltage error.
Type: unsigned binary word (32-bit)
Data Range: 0x0 to 0x3
Read/Write: R (Dynamic), R/W (Latched, Interrupt Enable, Edge/Level Interrupt)
Initialized Value: 0
VSS Overvoltage
There are four registers associated with the VSS Overvoltage Status: Dynamic, Latched, Interrupt Enable, and Set Edge/Level Interrupt.
VSS Overvoltage Dynamic Status |
|||||||||||||||
VSS Overvoltage Latched Status |
|||||||||||||||
VSS Overvoltage Interrupt Enable |
|||||||||||||||
VSS Overvoltage Set Edge/Level Interrupt |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Bank2 |
Bank1 |
Function: Sets the corresponding bit associated with the channel’s VSS Overvoltage error.
Type: unsigned binary word (32-bit)
Data Range: 0x0 to 0x3
Read/Write: R (Dynamic), R/W (Latched, Interrupt Enable, Edge/Level Interrupt)
Initialized Value: 0
VSS Surge Suppressor Fault
There are four registers associated with the VSS Surge Suppressor Fault Status: Dynamic, Latched, Interrupt Enable, and Set Edge/Level Interrupt.
VSS Surge Suppressor Fault Dynamic Status |
|||||||||||||||
VSS Surge Suppressor Fault Latched Status |
|||||||||||||||
VSS Surge Suppressor Fault Interrupt Enable |
|||||||||||||||
VSS Surge Suppressor Fault Set Edge/Level Interrupt |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Bank2 |
Bank1 |
Function: Sets the corresponding bit associated with the channel’s VSS Surge Suppressor Fault error.
Type: unsigned binary word (32-bit)
Data Range: 0x0 to 0x3
Read/Write: R (Dynamic), R/W (Latched, Interrupt Enable, Edge/Level Interrupt)
Initialized Value: 0
Driver Over-Temperature Fault
There are four registers associated with the Driver Over-Temperature Fault Status: Dynamic, Latched, Interrupt Enable, and Set Edge/Level Interrupt.
Driver Over-Temperature Fault Dynamic Status |
|||||||||||||||
Driver Over-Temperature Fault Latched Status |
|||||||||||||||
Driver Over-Temperature Fault Interrupt Enable |
|||||||||||||||
Driver Over-Temperature Fault Set Edge/Level Interrupt |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Bank2 |
Bank1 |
Function: Sets the corresponding bit associated with the channel’s Driver Over-Temperature Fault error.
Type: unsigned binary word (32-bit)
Data Range: 0x0 to 0x3
Read/Write: R (Dynamic), R/W (Latched, Interrupt Enable, Edge/Level Interrupt)
*Initialized Value: 0
User Watchdog Timer Fault Status
The Discrete Modules provide registers that support User Watchdog Timer capability. Refer to “User Watchdog Timer Module Manual” for the User Watchdog Timer Fault Status Register descriptions.
Summary Status
There are four registers associated with the Summary Status: Dynamic, Latched, Interrupt Enable, and Set Edge/Level Interrupt.
Summary Dynamic Status |
|||||||||||||||
Summary Latched Status |
|||||||||||||||
Summary Interrupt Enable |
|||||||||||||||
Summary Set Edge/Level Interrupt |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Ch4 |
Ch3 |
Ch2 |
Ch1 |
Function: Sets the corresponding bit when a fault is detected for BIT, overcurrent, undervoltage (VCC & VSS), overvoltage (VCC & VSS), surge suppressor fault (VCC & VSS), driver over-temperature or watchdog timer fault on that channel.
Type: unsigned binary word (32-bit)
Data Range: 0x0000 0000 to 0x0000 000F
Read/Write: R (Dynamic), R/W (Latched, Interrupt Enable, Edge/Level Interrupt)
Interrupt Vector and Steering
When interrupts are enabled, the interrupt vector associated with the specific interrupt can be programmed (typically with a unique number/identifier) such that it can be utilized in the Interrupt Service Routine (ISR) to identify the type of interrupt. When an interrupt occurs, the contents of the Interrupt Vector registers is reported as part of the interrupt mechanism. In addition to specifying the interrupt vector, the interrupt can be directed (“steered”) to the native bus or to the application running on the onboard ARM processor.
|
Note
|
The Interrupt Vector and Interrupt Steering registers are mapped to the Motherboard Common Memory and these registers are associated with the Module Slot position (refer to Function Register Map). |
Interrupt Vector
Function: Set an identifier for the interrupt.
Type: unsigned binary word (32-bit)
Data Range: 0x0000 0000 to 0xFFFF FFFF
Read/Write: R/W
Initialized Value: 0
Operational Settings: When an interrupt occurs, this value is reported as part of the interrupt mechanism.
Interrupt Steering
Function: Sets where to direct the interrupt.
Type: unsigned binary word (32-bit)
Data Range: See table Read/Write: R/W
Initialized Value: 0
Operational Settings: When an interrupt occurs, the interrupt is sent as specified:
Direct Interrupt to VME |
1 |
Direct Interrupt to ARM Processor (via SerDes) (Custom App on ARM or NAI Ethernet Listener App) |
2 |
Direct Interrupt to PCIe Bus |
5 |
Direct Interrupt to cPCI Bus |
6 |
FUNCTION REGISTER MAP
Key:
Bold Italic = Configuration/Control
Bold Underline = State/Measurement/Status
*When an event is detected, the bit associated with the event is set in this register and will remain set until the user clears the event bit. Clearing the bit requires writing a 1 back to the specific bit that was set when read (i.e., write-1-to-clear, writing a “1” to a bit set to “1” will set the bit to “0).
-
Data is represented in Floating Point if Enable Floating Point Mode register is set to Floating Point Mode (1).
Discrete Output Registers
0x2000 |
Output Mode Ch 1 |
R/W |
0x2100 |
Output Mode Ch 2 |
R/W |
0x2200 |
Output Mode Ch 3 |
R/W |
0x2300 |
Output Mode Ch 4 |
R/W |
0x2018 |
PWM Period Ch 1 |
R/W |
0x2118 |
PWM Period Ch 2 |
R/W |
0x2218 |
PWM Period Ch 3 |
R/W |
0x2318 |
PWM Period Ch 4 |
R/W |
0x201C |
PWM Pulse Width Ch 1 |
R/W |
0x211C |
PWM Pulse Width Ch 2 |
R/W |
0x221C |
PWM Pulse Width Ch 3 |
R/W |
0x222C |
PWM Pulse Width Ch 4 |
R/W |
0x1000 |
Drive Output High/Low/Tristate Ch 1-4 |
R/W |
0x1004 |
Output Format Ch 1-4 |
R/W |
0x1010 |
PWM Enable Ch 1-4 |
R/W |
0x2020 |
PWM Burst Count Ch 1 |
R/W |
0x2120 |
PWM Burst Count Ch 2 |
R/W |
0x2220 |
PWM Burst Count Ch 3 |
R/W |
0x2320 |
PWM Burst Count Ch 4 |
R/W |
Discrete Output Control Registers
0x1008 |
Full Bridge Enable |
R/W |
0x100C |
Overcurrent Reset Ch 1-4 |
R/W |
0x2004 |
Current Limit Ch 1 |
R/W |
0x2104 |
Current Limit Ch 2 |
R/W |
0x2204 |
Current Limit Ch 3 |
R/W |
0x2304 |
Current Limit Ch 4 |
R/W |
0x1808 |
VCC Minimum Voltage Bank 1 |
R/W |
0x180C |
VCC Maximum Voltage Bank 1 |
R/W |
0x1818 |
VSS Minimum Voltage Bank 1 |
R/W |
0x181C |
VSS Maximum Voltage Bank 1 |
R/W |
0x1908 |
VCC Minimum Voltage Bank 2 |
R/W |
0x190C |
VCC Maximum Voltage Bank 2 |
R/W |
0x1918 |
VSS Minimum Voltage Bank 2 |
R/W |
0x191C |
VSS Maximum Voltage Bank 2 |
R/W |
Discrete Output Measurement Registers
0x2008 |
Drive Voltage (Sampled) Ch 1 |
R |
0x2108 |
Drive Voltage (Sampled) Ch 2 |
R |
0x2208 |
Drive Voltage (Sampled) Ch 3 |
R |
0x2308 |
Drive Voltage (Sampled) Ch 4 |
R |
0x200C |
Drive Voltage (RMS) Ch 1 |
R |
0x210C |
Drive Voltage (RMS) Ch 2 |
R |
0x220C |
Drive Voltage (RMS) Ch 3 |
R |
0x230C |
Drive Voltage (RMS) Ch 4 |
R |
0x2010 |
Drive Current (Sampled) Ch 1 |
R |
0x2110 |
Drive Current (Sampled) Ch 2 |
R |
0x2210 |
Drive Current (Sampled) Ch 3 |
R |
0x2310 |
Drive Current (Sampled) Ch 4 |
R |
0x2014 |
Drive Current (RMS) Ch 1 |
R |
0x2114 |
Drive Current (RMS) Ch 2 |
R |
0x2214 |
Drive Current (RMS) Ch 3 |
R |
0x2314 |
Drive Current (RMS) Ch 4 |
R |
0x1800 |
VCC Voltage Measured Bank 1 |
R |
0x1804 |
VCC Current Measured Bank 1 |
R |
0x1810 |
VSS Voltage Measured Bank 1 |
R |
0x1814 |
VSS Current Measured Bank 1 |
R |
0x1900 |
Vcc Voltage Measured Bank 2 |
R |
0x1904 |
Vcc Current Measured Bank 2 |
R |
0x1910 |
Vss Voltage Measured Bank 2 |
R |
0x1914 |
Vss Current Measured Bank 2 |
R |
0x1820 |
Drive Temperature Bank 1 |
R |
0x1920 |
Drive Temperature Bank 2 |
R |
Watchdog Timer Registers
The Discrete Module provide registers that support User Watchdog Timer capability. Refer to “User Watchdog Timer Module Manual” for the User Watchdog Timer Fault Status Function Register Map.
Module Common Registers
Refer to “Module Common Registers Module Manual” for the Module Common Registers Function Register Map.
Status Registers
BIT Status
0x0800 |
Dynamic Status |
R |
0x0804 |
Latched Status* |
R/W |
0x0808 |
Interrupt Enable |
R/W |
0x080C |
Set Edge/Level Interrupt |
R/W |
Overcurrent Status
0x0810 |
Dynamic Status |
R |
0x0814 |
Latched Status* |
R/W |
0x0818 |
Interrupt Enable |
R/W |
0x081C |
Set Edge/Level Interrupt |
R/W |
VCC Undervoltage Status
0x0820 |
Dynamic Status |
R |
0x0824 |
Latched Status* |
R/W |
0x0828 |
Interrupt Enable |
R/W |
0x082C |
Set Edge/Level Interrupt |
R/W |
VCC Overvoltage Status
0x0830 |
Dynamic Status |
R |
0x0834 |
Latched Status* |
R/W |
0x0838 |
Interrupt Enable |
R/W |
0x083C |
Set Edge/Level Interrupt |
R/W |
VCC Surge Suppressor Fault
0x0840 |
Dynamic Status |
R |
0x0844 |
Latched Status* |
R/W |
0x0848 |
Interrupt Enable |
R/W |
0x084C |
Set Edge/Level Interrupt |
R/W |
VSS Undervoltage
0x0850 |
Dynamic Status |
R |
0x0854 |
Latched Status* |
R/W |
0x0858 |
Interrupt Enable |
R/W |
0x085C |
Set Edge/Level Interrupt |
R/W |
VSS Overvoltage
0x0860 |
Dynamic Status |
R |
0x0864 |
Latched Status* |
R/W |
0x0868 |
Interrupt Enable |
R/W |
0x086C |
Set Edge/Level Interrupt |
R/W |
VSS Surge Suppressor Fault
0x0870 |
Dynamic Status |
R |
0x0874 |
Latched Status* |
R/W |
0x0878 |
Interrupt Enable |
R/W |
0x087C |
Set Edge/Level Interrupt |
R/W |
Driver Over-Temperature Fault
0x0880 |
Dynamic Status |
R |
0x0884 |
Latched Status* |
R/W |
0x0888 |
Interrupt Enable |
R/W |
0x088C |
Set Edge/Level Interrupt |
R/W |
User Watchdog Timer Fault Status
The Discrete Modules provide registers that support User Watchdog Timer capability. Refer to “User Watchdog Timer Module Manual” for the User Watchdog Timer Fault Status Function Register Map.
Summary Status
0x09A0 |
Dynamic Status |
R |
0x09A4 |
Latched Status* |
R/W |
0x09A8 |
Interrupt Enable |
R/W |
0x09AC |
Set Edge/Level Interrupt |
R/W |
Interrupt Registers
The Interrupt Vector and Interrupt Steering registers are located on the Motherboard Memory Space and do not require any Module Address Offsets. These registers are accessed using the absolute addresses listed in the table below.
0x0500 |
Module 1 Interrupt Vector 1 - BIT |
R/W |
0x0504 to 0x0540 |
Module 1 Interrupt Vector 2-17 - Reserved |
R/W |
0x0544 |
Module 1 Interrupt Vector 18 - Overcurrent |
R/W |
0x0548 |
Module 1 Interrupt Vector 19 - Reserved |
R/W |
0x054C |
Module 1 Interrupt Vector 20 - Undervoltage |
R/W |
0x0550 |
Module 1 Interrupt Vector 21 - Overvoltage |
R/W |
0x0554 |
Module 1 Interrupt Vector 22 - Driver Over-Temperature |
R/W |
0x0558 |
Module 1 Interrupt Vector 23 -Surge Suppressor Fault |
R/W |
0x055C to 0x0564 |
Module 1 Interrupt Vector 24-26 - Reserved |
R/W |
0x0568 |
Module 1 Interrupt Vector 27 - Summary |
R/W |
0x056C |
Module 1 Interrupt Vector 28 - User Watchdog Timer Fault |
R/W |
0x0570 to 0x057C |
Module 1 Interrupt Vector 29-32 - Reserved |
R/W |
0x0600 |
Module 1 Interrupt Steering 1 - BIT |
R/W |
0x0604 to 0x0640 |
Module 1 Interrupt Steering 2-17 - Reserved |
R/W |
0x0644 |
Module 1 Interrupt Steering 18 - Overcurrent |
R/W |
0x0648 |
Module 1 Interrupt Steering 19 - Reserved |
R/W |
0x064C |
Module 1 Interrupt Steering 20 - Undervoltage |
R/W |
0x0650 |
Module 1 Interrupt Steering 21 - Overvoltage |
R/W |
0x0654 |
Module 1 Interrupt Steering 22 - Driver Over-Temperature |
R/W |
0x0658 |
Module 1 Interrupt Steering 23 -Surge Suppressor Fault |
R/W |
0x065C to 0x0664 |
Module 1 Interrupt Steering 24-26 - Reserved |
R/W |
0x0668 |
Module 1 Interrupt Steering 27 - Summary |
R/W |
0x066C |
Module 1 Interrupt Steering 28 - User Watchdog Timer Fault |
R/W |
0x0670 to 0x067C |
Module 1 Interrupt Steering 29-32 - Reserved |
R/W |
0x0700 |
Module 2 Interrupt Vector 1 - BIT |
R/W |
0x0704 to 0x0740 |
Module 2 Interrupt Vector 2-17 - Reserved |
R/W |
0x0744 |
Module 2 Interrupt Vector 18 - Overcurrent |
R/W |
0x0748 |
Module 2 Interrupt Vector 19 - Reserved |
R/W |
0x074C |
Module 2 Interrupt Vector 20 - Undervoltage |
R/W |
0x0750 |
Module 2 Interrupt Vector 21 - Overvoltage |
R/W |
0x0754 |
Module 2 Interrupt Vector 22 - Driver Over-Temperature |
R/W |
0x0758 |
Module 2 Interrupt Vector 23 -Surge Suppressor Fault |
R/W |
0x075C to 0x0764 |
Module 2 Interrupt Vector 24-26 - Reserved |
R/W |
0x0768 |
Module 2 Interrupt Vector 27 - Summary |
R/W |
0x076C |
Module 2 Interrupt Vector 28 - User Watchdog Timer Fault |
R/W |
0x0770 to 0x077C |
Module 2 Interrupt Vector 29-32 - Reserved |
R/W |
0x0800 |
Module 2 Interrupt Steering 1 - BIT |
R/W |
0x0804 to 0x0840 |
Module 2 Interrupt Steering 2-17 - Reserved |
R/W |
0x0844 |
Module 2 Interrupt Steering 18 - Overcurrent |
R/W |
0x0848 |
Module 2 Interrupt Steering 19 - Reserved |
R/W |
0x084C |
Module 2 Interrupt Steering 20 - Undervoltage |
R/W |
0x0850 |
Module 2 Interrupt Steering 21 - Overvoltage |
R/W |
0x0854 |
Module 2 Interrupt Steering 22 - Driver Over-Temperature |
R/W |
0x0858 |
Module 2 Interrupt Steering 23 -Surge Suppressor Fault |
R/W |
0x085C to 0x0864 |
Module 2 Interrupt Steering 24-26 - Reserved |
R/W |
0x0868 |
Module 2 Interrupt Steering 27 - Summary |
R/W |
0x086C |
Module 2 Interrupt Steering 28 - User Watchdog Timer Fault |
R/W |
0x0870 to 0x087C |
Module 2 Interrupt Steering 29-32 - Reserved |
R/W |
0x0900 |
Module 3 Interrupt Vector 1 - BIT |
R/W |
0x0904 to 0x0940 |
Module 3 Interrupt Vector 2-17 - Reserved |
R/W |
0x0944 |
Module 3 Interrupt Vector 18 - Overcurrent |
R/W |
0x0948 |
Module 3 Interrupt Vector 19 - Reserved |
R/W |
0x094C |
Module 3 Interrupt Vector 20 - Undervoltage |
R/W |
0x0950 |
Module 3 Interrupt Vector 21 - Overvoltage |
R/W |
0x0954 |
Module 3 Interrupt Vector 22 - Driver Over-Temperature |
R/W |
0x0958 |
Module 3 Interrupt Vector 23 -Surge Suppressor Fault |
R/W |
0x095C to 0x0964 |
Module 3 Interrupt Vector 24-26 - Reserved |
R/W |
0x0968 |
Module 3 Interrupt Vector 27 - Summary |
R/W |
0x096C |
Module 3 Interrupt Vector 28 - User Watchdog Timer Fault |
R/W |
0x0970 to 0x097C |
Module 3 Interrupt Vector 29-32 - Reserved |
R/W |
0x0A00 |
Module 3 Interrupt Steering 1 - BIT |
R/W |
0x0A04 to 0x0A40 |
Module 3 Interrupt Steering 2-17 - Reserved |
R/W |
0x0A44 |
Module 3 Interrupt Steering 18 - Overcurrent |
R/W |
0x0A48 |
Module 3 Interrupt Steering 19 - Reserved |
R/W |
0x0A4C |
Module 3 Interrupt Steering 20 - Undervoltage |
R/W |
0x0A50 |
Module 3 Interrupt Steering 21 - Overvoltage |
R/W |
0x0A54 |
Module 3 Interrupt Steering 22 - Driver Over-Temperature |
R/W |
0x0A58 |
Module 3 Interrupt Steering 23 -Surge Suppressor Fault |
R/W |
0x0A5C to 0x0A64 |
Module 3 Interrupt Steering 24-26 - Reserved |
R/W |
0x0A68 |
Module 3 Interrupt Steering 27 - Summary |
R/W |
0x0A6C |
Module 3 Interrupt Steering 28 - User Watchdog Timer Fault |
R/W |
0x0A70 to 0x0A7C |
Module 3 Interrupt Steering 29-32 - Reserved |
R/W |
0x0B00 |
Module 4 Interrupt Vector 1 - BIT |
R/W |
0x0B04 to 0x0B40 |
Module 4 Interrupt Vector 2-17 - Reserved |
R/W |
0x0B44 |
Module 4 Interrupt Vector 18 - Overcurrent |
R/W |
0x0B48 |
Module 4 Interrupt Vector 19 - Reserved |
R/W |
0x0B4C |
Module 4 Interrupt Vector 20 - Undervoltage |
R/W |
0x0B50 |
Module 4 Interrupt Vector 21 - Overvoltage |
R/W |
0x0B54 |
Module 4 Interrupt Vector 22 - Driver Over-Temperature |
R/W |
0x0B58 |
Module 4 Interrupt Vector 23 -Surge Suppressor Fault |
R/W |
0x0B5C to 0x0B64 |
Module 4 Interrupt Vector 24-26 - Reserved |
R/W |
0x0B68 |
Module 4 Interrupt Vector 27 - Summary |
R/W |
0x0B6C |
Module 4 Interrupt Vector 28 - User Watchdog Timer Fault |
R/W |
0x0B70 to 0x0B7C |
Module 4 Interrupt Vector 29-32 - Reserved |
R/W |
0x0C00 |
Module 4 Interrupt Steering 1 - BIT |
R/W |
0x0C04 to 0x0E40 |
Module 4 Interrupt Steering 2-17 - Reserved |
R/W |
0x0C44 |
Module 4 Interrupt Steering 18 - Overcurrent |
R/W |
0x0C48 |
Module 4 Interrupt Steering 19 - Reserved |
R/W |
0x0C4C |
Module 4 Interrupt Steering 20 - Undervoltage |
R/W |
0x0C50 |
Module 4 Interrupt Steering 21 - Overvoltage |
R/W |
0x0C54 |
Module 4 Interrupt Steering 22 - Driver Over-Temperature |
R/W |
0x0C58 |
Module 4 Interrupt Steering 23 -Surge Suppressor Fault |
R/W |
0x0C5C to 0x0E64 |
Module 4 Interrupt Steering 24-26 - Reserved |
R/W |
0x0C68 |
Module 4 Interrupt Steering 27 - Summary |
R/W |
0x0C6C |
Module 4 Interrupt Steering 28 - User Watchdog Timer Fault |
R/W |
0x0C70 to 0x0C7C |
Module 4 Interrupt Steering 29-32 - Reserved |
R/W |
0x0D00 |
Module 5 Interrupt Vector 1 - BIT |
R/W |
0x0D04 to 0x0D40 |
Module 5 Interrupt Vector 2-17 - Reserved |
R/W |
0x0D44 |
Module 5 Interrupt Vector 18 - Overcurrent |
R/W |
0x0D48 |
Module 5 Interrupt Vector 19 - Reserved |
R/W |
0x0D4C |
Module 5 Interrupt Vector 20 - Undervoltage |
R/W |
0x0D50 |
Module 5 Interrupt Vector 21 - Overvoltage |
R/W |
0x0D54 |
Module 5 Interrupt Vector 22 - Driver Over-Temperature |
R/W |
0x0D58 |
Module 5 Interrupt Vector 23 -Surge Suppressor Fault |
R/W |
0x0D5C to 0x0D64 |
Module 5 Interrupt Vector 24-26 - Reserved |
R/W |
0x0D68 |
Module 5 Interrupt Vector 27 - Summary |
R/W |
0x0D6C |
Module 5 Interrupt Vector 28 - User Watchdog Timer Fault |
R/W |
0x0D70 to 0x0D7C |
Module 5 Interrupt Vector 29-32 - Reserved |
R/W |
0x0E00 |
Module 5 Interrupt Steering 1 - BIT |
R/W |
0x0E04 to 0x0E40 |
Module 5 Interrupt Steering 2-17 - Reserved |
R/W |
0x0E44 |
Module 5 Interrupt Steering 18 - Overcurrent |
R/W |
0x0E48 |
Module 5 Interrupt Steering 19 - Reserved |
R/W |
0x0E4C |
Module 5 Interrupt Steering 20 - Undervoltage |
R/W |
0x0E50 |
Module 5 Interrupt Steering 21 - Overvoltage |
R/W |
0x0E54 |
Module 5 Interrupt Steering 22 - Driver Over-Temperature |
R/W |
0x0E58 |
Module 5 Interrupt Steering 23 -Surge Suppressor Fault |
R/W |
0x0E5C to 0x0E64 |
Module 5 Interrupt Steering 24-26 - Reserved |
R/W |
0x0E68 |
Module 5 Interrupt Steering 27 - Summary |
R/W |
0x0E6C |
Module 5 Interrupt Steering 28 - User Watchdog Timer Fault |
R/W |
0x0E70 to 0x0E7C |
Module 5 Interrupt Steering 29-32 - Reserved |
R/W |
0x0F00 |
Module 6 Interrupt Vector 1 - BIT |
R/W |
0x0F04 to0x0F4 |
Module 6 Interrupt Vector 2-17 - Reserved |
R/W |
0x0F44 |
Module 6 Interrupt Vector 18 - Overcurrent |
R/W |
0x0F48 |
Module 6 Interrupt Vector 19 - Reserved |
R/W |
0x0F4C |
Module 6 Interrupt Vector 20 - Undervoltage |
R/W |
0x0F50 |
Module 6 Interrupt Vector 21 -Overvoltage |
R/W |
0x0F54 |
Module 6 Interrupt Vector 22 - Driver Over-Temperature |
R/W 0x0F58 |
Module 6 Interrupt Vector 23 - Surge Suppressor Fault |
R/W |
0x0F5C to 0x0F64 |
Module 6 Interrupt Vector 24-26 -Reserved |
R/W |
0x0F68 |
Module 6 Interrupt Vector 27 - Summary |
R/W |
0x0F6C |
Module 6 Interrupt Vector 28 - User Watchdog Timer Fault |
R/W |
0x0F70 to0x0F7C |
0x1000 |
Module 6 Interrupt Steering 1 - BIT |
R/W |
0x1004 to 0x1040 |
Module 6 Interrupt Steering 2-17 - Reserved |
R/W |
0x1044 |
Module 6 Interrupt Steering 18 - Overcurrent |
R/W |
0x1048 |
Module 6 Interrupt Steering 19 - Reserved |
R/W |
0x104C |
Module 6 Interrupt Steering 20 - Undervoltage |
R/W |
0x1050 |
Module 6 Interrupt Steering 21 - Overvoltage |
R/W |
0x1054 |
Module 6 Interrupt Steering 22 - Driver Over-Temperature |
R/W |
0x1058 |
Module 6 Interrupt Steering 23 - Surge Suppressor Fault |
R/W |
0x105C to 0x1064 |
Module 6 Interrupt Steering 24-26 - Reserved |
R/W |
0x106 |
Module 6 Interrupt Steering 27 - Summary |
R/W |
0x106 |
Module 6 Interrupt Steering 28 - User Watchdog Timer Fault |
R/W |
0x1070 to 0x107C |
Module 6 Interrupt Steering 29-32 - Reserved |
R/W |
APPENDIX: PIN-OUT DETAILS
Pin-out details (for reference) are shown below, with respect to DATAIO. Additional information on pin-outs can be found in the Motherboard Operational Manuals
Module Signal(Ref Only) |
44-Pin I/O |
50-Pin I/O (Mod Slot 1-J3) |
50-Pin I/O (Mod Slot 2-J4) |
50-Pin I/O (Mod Slot 3-J3) |
50-Pin I/O (Mod Slot 3-J4) |
DT3 |
DATIO1 |
2 |
10 |
1 |
2 |
CH1-DRV |
|
DATIO2 |
24 |
35 |
26 |
27 |
CH1-DRV |
|
DATIO3 |
3 |
11 |
2 |
3 |
CH1-DRV |
|
DATIO4 |
25 |
36 |
27 |
28 |
CH1-DRV |
|
DATIO5 |
5 |
13 |
4 |
5 |
VCC1 |
|
DATIO6 |
27 |
38 |
29 |
30 |
VSS1 |
|
DATIO7 |
7 |
14 |
5 |
6 |
CH2-DRV |
|
DATIO8 |
29 |
39 |
30 |
31 |
CH2-DRV |
|
DATIO9 |
8 |
15 |
6 |
7 |
CH2-DRV |
|
DATIO10 |
30 |
40 |
31 |
32 |
CH2-DRV |
|
DATIO11 |
10 |
10 |
17 |
8 |
9 |
VCC1 |
DATIO12 |
32 |
42 |
33 |
34 |
VSS1 |
|
DATIO13 |
12 |
18 |
9 |
17 |
CH3-DRV |
|
DATIO14 |
34 |
43 |
34 |
42 |
CH3-DRV |
|
DATIO15 |
13 |
19 |
10 |
18 |
CH3-DRV |
|
DATIO16 |
35 |
44 |
35 |
43 |
CH3-DRV |
|
DATIO17 |
15 |
21 |
12 |
20 |
VCC2 |
|
DATIO18 |
37 |
46 |
37 |
45 |
VSS2 |
|
DATIO19 |
17 |
22 |
13 |
21 |
CH4-DRV |
|
DATIO20 |
39 |
47 |
38 |
46 |
CH4-DRV |
|
DATIO21 |
18 |
23 |
14 |
22 |
CH4-DRV |
|
DATIO22 |
40 |
48 |
39 |
47 |
CH4-DRV |
|
DATIO23 |
20 |
25 |
16 |
24 |
VCC2 |
|
DATIO24 |
42 |
50 |
41 |
49 |
VSS2 |
|
DATIO25 |
4 |
12 |
3 |
4 |
||
DATIO26 |
26 |
37 |
28 |
29 |
||
DATIO27 |
9 |
16 |
7 |
8 |
||
DATIO28 |
31 |
41 |
32 |
33 |
ISO-GND1 |
|
DATIO29 |
14 |
20 |
11 |
19 |
||
DATIO30 |
36 |
45 |
36 |
44 |
||
DATIO31 |
19 |
24 |
15 |
23 |
||
DATIO32 |
41 |
49 |
40 |
48 |
ISO-GND2 |
|
DATIO33 |
6 |
|||||
DATIO34 |
28 |
|||||
DATIO35 |
11 |
EXT-SYNC+ |
||||
DATIO36 |
33 |
EXT-SYNC |
||||
DATIO37 |
16 |
|||||
DATIO38 |
38 |
|||||
DATIO39 |
21 |
|||||
DATIO40 |
43 |
|||||
N/A |
STATUS AND INTERRUPTS
Edit this on GitLab
Status registers indicate the detection of faults or events. The status registers can be channel bit-mapped or event bit-mapped. An example of a channel bit-mapped register is the BIT status register, and an example of an event bit-mapped register is the FIFO status register.
For those status registers that allow interrupts to be generated upon the detection of the fault or the event, there are four registers associated with each status: Dynamic, Latched, Interrupt Enabled, and Set Edge/Level Interrupt.
Dynamic Status: The Dynamic Status register indicates the current condition of the fault or the event. If the fault or the event is momentary, the contents in this register will be clear when the fault or the event goes away. The Dynamic Status register can be polled, however, if the fault or the event is sporadic, it is possible for the indication of the fault or the event to be missed.
Latched Status: The Latched Status register indicates whether the fault or the event has occurred and keeps the state until it is cleared by the user. Reading the Latched Status register is a better alternative to polling the Dynamic Status register because the contents of this register will not clear until the user commands to clear the specific bit(s) associated with the fault or the event in the Latched Status register. Once the status register has been read, the act of writing a 1 back to the applicable status register to any specific bit (channel/event) location will “clear” the bit (set the bit to 0). When clearing the channel/event bits, it is strongly recommended to write back the same bit pattern as read from the Latched Status register. For example, if the channel bit-mapped Latched Status register contains the value 0x0000 0005, which indicates fault/event detection on channel 1 and 3, write the value 0x0000 0005 to the Latched Status register to clear the fault/event status for channel 1 and 3. Writing a “1” to other channels that are not set (example 0x0000 000F) may result in incorrectly “clearing” incoming faults/events for those channels (example, channel 2 and 4).
Interrupt Enable: If interrupts are preferred upon the detection of a fault or an event, enable the specific channel/event interrupt in the Interrupt Enable register. The bits in Interrupt Enable register map to the same bits in the Latched Status register. When a fault or event occurs, an interrupt will be fired. Subsequent interrupts will not trigger until the application acknowledges the fired interrupt by clearing the associated channel/event bit in the Latched Status register. If the interruptible condition is still persistent after clearing the bit, this may retrigger the interrupt depending on the Edge/Level setting.
Set Edge/Level Interrupt: When interrupts are enabled, the condition on retriggering the interrupt after the Latch Register is “cleared” can be specified as “edge” triggered or “level” triggered. Note, the Edge/Level Trigger also affects how the Latched Register value is adjusted after it is “cleared” (see below).
-
Edge triggered: An interrupt will be retriggered when the Latched Status register change from low (0) to high (1) state. Uses for edge-triggered interrupts would include transition detections (Low-to-High transitions, High-to-Low transitions) or fault detections. After “clearing” an interrupt, another interrupt will not occur until the next transition or the re-occurrence of the fault again.
-
Level triggered: An interrupt will be generated when the Latched Status register remains at the high (1) state. Level-triggered interrupts are used to indicate that something needs attention.
Interrupt Vector and Steering
When interrupts are enabled, the interrupt vector associated with the specific interrupt can be programmed with a unique number/identifier defined by the user such that it can be utilized in the Interrupt Service Routine (ISR) to identify the type of interrupt. When an interrupt occurs, the contents of the Interrupt Vector registers is reported as part of the interrupt mechanism. In addition to specifying the interrupt vector, the interrupt can be directed (“steered”) to the native bus or to the application running on the onboard ARM processor.
Interrupt Trigger Types
In most applications, limiting the number of interrupts generated is preferred as interrupts are costly, thus choosing the correct Edge/Level interrupt trigger to use is important.
Example 1: Fault detection
This example illustrates interrupt considerations when detecting a fault like an “open” on a line. When an “open” is detected, the system will receive an interrupt. If the “open” on the line is persistent and the trigger is set to “edge”, upon “clearing” the interrupt, the system will not regenerate another interrupt. If, instead, the trigger is set to “level”, upon “clearing” the interrupt, the system will re-generate another interrupt. Thus, in this case, it will be better to set the trigger type to “edge”.
Example 2: Threshold detection
This example illustrates interrupt considerations when detecting an event like reaching or exceeding the “high watermark” threshold value. In a communication device, when the number of elements received in the FIFO reaches the high-watermark threshold, an interrupt will be generated. Normally, the application would read the count of the number of elements in the FIFO and read this number of elements from the FIFO. After reading the FIFO data, the application would “clear” the interrupt. If the trigger type is set to “edge”, another interrupt will be generated only if the number of elements in FIFO goes below the “high watermark” after the “clearing” the interrupt and then fills up to reach the “high watermark” threshold value. Since receiving communication data is inherently asynchronous, it is possible that data can continue to fill the FIFO as the application is pulling data off the FIFO. If, at the time the interrupt is “cleared”, the number of elements in the FIFO is at or above the “high watermark”, no interrupts will be generated. In this case, it will be better to set the trigger type to “level”, as the purpose here is to make sure that the FIFO is serviced when the number of elements exceeds the high watermark threshold value. Thus, upon “clearing” the interrupt, if the number of elements in the FIFO is at or above the “high watermark” threshold value, another interrupt will be generated indicating that the FIFO needs to be serviced.
Dynamic and Latched Status Registers Examples
The examples in this section illustrate the differences in behavior of the Dynamic Status and Latched Status registers as well as the differences in behavior of Edge/Level Trigger when the Latched Status register is cleared.
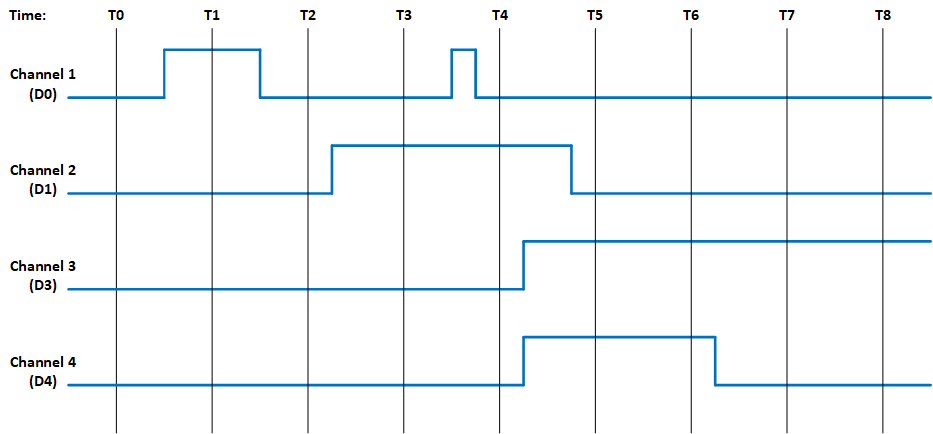
Figure 1. Example of Module’s Channel-Mapped Dynamic and Latched Status States
| No Clearing of Latched Status | Clearing of Latched Status (Edge-Triggered) | Clearing of Latched Status(Level-Triggered) | ||||
|---|---|---|---|---|---|---|
Time |
Dynamic Status |
Latched Status |
Action |
Latched Status |
Action |
Latched |
T0 |
0x0 |
0x0 |
Read Latched Register |
0x0 |
Read Latched Register |
0x0 |
T1 |
0x1 |
0x1 |
Read Latched Register |
0x1 |
0x1 |
|
T1 |
0x1 |
0x1 |
Write 0x1 to Latched Register |
Write 0x1 to Latched Register |
||
T1 |
0x1 |
0x1 |
0x0 |
0x1 |
||
T2 |
0x0 |
0x1 |
Read Latched Register |
0x0 |
Read Latched Register |
0x1 |
T2 |
0x0 |
0x1 |
Read Latched Register |
0x0 |
Write 0x1 to Latched Register |
|
T2 |
0x0 |
0x1 |
Read Latched Register |
0x0 |
0x0 |
|
T3 |
0x2 |
0x3 |
Read Latched Register |
0x2 |
Read Latched Register |
0x2 |
T3 |
0x2 |
0x3 |
Write 0x2 to Latched Register |
Write 0x2 to Latched Register |
||
T3 |
0x2 |
0x3 |
0x0 |
0x2 |
||
T4 |
0x2 |
0x3 |
Read Latched Register |
0x1 |
Read Latched Register |
0x3 |
T4 |
0x2 |
0x3 |
Write 0x1 to Latched Register |
Write 0x3 to Latched Register |
||
T4 |
0x2 |
0x3 |
0x0 |
0x2 |
||
T5 |
0xC |
0xF |
Read Latched Register |
0xC |
Read Latched Register |
0xE |
T5 |
0xC |
0xF |
Write 0xC to Latched Register |
Write 0xE to Latched Register |
||
T5 |
0xC |
0xF |
0x0 |
0xC |
||
T6 |
0xC |
0xF |
Read Latched Register |
0x0 |
Read Latched |
0xC |
T6 |
0xC |
0xF |
Read Latched Register |
0x0 |
Write 0xC to Latched Register |
|
T6 |
0xC |
0xF |
Read Latched Register |
0x0 |
0xC |
|
T7 |
0x4 |
0xF |
Read Latched Register |
0x0 |
Read Latched Register |
0xC |
T7 |
0x4 |
0xF |
Read Latched Register |
0x0 |
Write 0xC to Latched Register |
|
T7 |
0x4 |
0xF |
Read Latched Register |
0x0 |
0x4 |
|
T8 |
0x4 |
0xF |
Read Latched Register |
0x0 |
Read Latched Register |
0x4 |
Interrupt Examples
The examples in this section illustrate the interrupt behavior with Edge/Level Trigger.
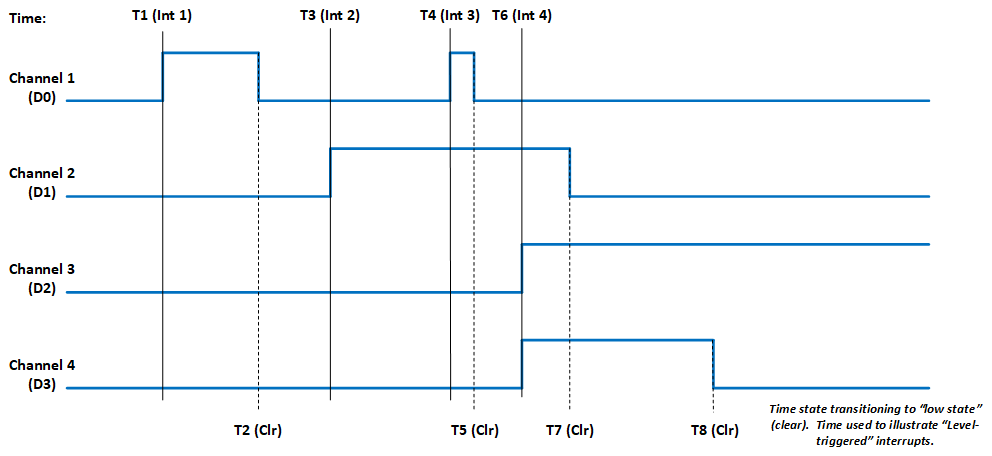
Figure 2. Illustration of Latched Status State for Module with 4-Channels with Interrupt Enabled
Time |
Latched Status (Edge-Triggered - Clear Multi-Channel) |
Latched Status (Edge-Triggered - Clear Single Channel) |
Latched Status (Level-Triggered - Clear Multi-Channel) |
|||
Action |
Latched |
Action |
Latched |
Action |
Latched |
|
T1 (Int 1) |
Interrupt Generated Read Latched Registers |
0x1 |
Interrupt Generated Read Latched Registers |
0x1 |
Interrupt Generated Read Latched Registers |
0x1 |
T1 (Int 1) |
Write 0x1 to Latched Register |
Write 0x1 to Latched Register |
Write 0x1 to Latched Register |
|||
T1 (Int 1) |
0x0 |
0x0 |
Interrupt re-triggers Note, interrupt re-triggers after each clear until T2. |
0x1 |
||
T3 (Int 2) |
Interrupt Generated Read Latched Registers |
0x2 |
Interrupt Generated Read Latched Registers |
0x2 |
Interrupt Generated Read Latched Registers |
0x2 |
T3 (Int 2) |
Write 0x2 to Latched Register |
Write 0x2 to Latched Register |
Write 0x2 to Latched Register |
|||
T3 (Int 2) |
0x0 |
0x0 |
Interrupt re-triggers Note, interrupt re-triggers after each clear until T7. |
0x2 |
||
T4 (Int 3) |
Interrupt Generated Read Latched Registers |
0x1 |
Interrupt Generated Read Latched Registers |
0x1 |
Interrupt Generated Read Latched Registers |
0x3 |
T4 (Int 3) |
Write 0x1 to Latched Register |
Write 0x1 to Latched Register |
Write 0x3 to Latched Register |
|||
T4 (Int 3) |
0x0 |
0x0 |
Interrupt re-triggers Note, interrupt re-triggers after each clear and 0x3 is reported in Latched Register until T5. |
0x3 |
||
T4 (Int 3) |
0x0 |
0x0 |
Interrupt re-triggers Note, interrupt re-triggers after each clear until T7. |
0x2 |
||
T6 (Int 4) |
Interrupt Generated Read Latched Registers |
0xC |
Interrupt Generated Read Latched Registers |
0xC |
Interrupt Generated Read Latched Registers |
0xE |
T6 (Int 4) |
Write 0xC to Latched Register |
Write 0x4 to Latched Register |
Write 0xE to Latched Register |
|||
T6 (Int 4) |
0x0 |
Interrupt re-triggers Write 0x8 to Latched Register |
0x8 |
Interrupt re-triggers Note, interrupt re-triggers after each clear and 0xE is reported in Latched Register until T7. |
0xE |
|
T6 (Int 4) |
0x0 |
0x0 |
Interrupt re-triggers Note, interrupt re-triggers after each clear and 0xC is reported in Latched Register until T8. |
0xC |
||
T6 (Int 4) |
0x0 |
0x0 |
Interrupt re-triggers Note, interrupt re-triggers after each clear and 0x4 is reported in Latched Register always. |
0x4 |
||
REVISION HISTORY
Motherboard Manual - Status and Interrupts Revision History |
||
Revision |
Revision Date |
Description |
C |
2021-11-30 |
C08896; Transition manual to docbuilder format - no technical info change. |
DOCS.NAII REVISIONS
Revision Date |
Description |
2026-03-02 |
Formatting updates to document; no technical changes. |
USER WATCHDOG TIMER MODULE MANUAL
Edit this on GitLab
User Watchdog Timer Capability
The User Watchdog Timer (UWDT) Capability is available on the following modules:
-
AC Reference Source Modules
-
AC1 - 1 Channel, 2-115 Vrms, 47 Hz - 20kHz
-
AC2 - 2 Channels, 2-28 Vrms, 47 Hz - 20kHz
-
AC3 - 1 Channel, 28-115 Vrms, 47 Hz - 2.5 kHz
-
-
Differential Transceiver Modules
-
DF1/DF2 - 16 Channels Differential I/O
-
-
Digital-to-Analog (D/A) Modules
-
DA1 - 12 Channels, ±10 VDC @ 25 mA, Voltage or Current Control Modes
-
DA2 - 16 Channels, ±10 VDC @ 10 mA
-
DA3 - 4 Channels, ±40 VDC @ ±100 mA, Voltage or Current Control Modes
-
DA4 - 4 Channels, ±80 VDC @ 10 mA
-
DA5 - 4 Channels, ±65 VDC or ±2 A, Voltage or Current Control Modes
-
-
Digital-to-Synchro/Resolver (D/S) or Digital-to-L( R )VDT (D/LV) Modules
-
(Not supported)
-
-
Discrete I/O Modules
-
DT1/DT4 - 24 Channels, Programmable for either input or output, output up to 500 mA per channel from an applied external 3 - 60 VCC source.
-
DT2/DT5 - 16 Channels, Programmable for either input voltage measurements (±80 V) or as a bi-directional current switch (up to 500 mA per channel).
-
DT3/DT6 - 4 Channels, Programmable for either input voltage measurements (±100 V) or as a bi-directional current switch (up to 3 A per channel).
-
-
TTL/CMOS Modules
-
TL1-TL8 - 24 Channels, Programmable for either input or output.
-
Principle of Operation
The User Watchdog Timer is optionally activated by the applications that require the module’s outputs to be disabled as a failsafe in the event of an application failure or crash. The circuit is designed such that a specific periodic write strobe pattern must be executed by the software to maintain operation and prevent the disablement from taking place.
The User Watchdog Timer is inactive until the application sends an initial strobe by writing the value 0x55AA to the UWDT Strobe register. After activating the User Watchdog Timer, the application must continually strobe the timer within the intervals specified with the configurable UWDT Quiet Time and UWDT Window registers. The timing of the strobes must be consistent with the following rules:
-
The application must not strobe during the Quiet time.
-
The application must strobe within the Window time.
-
The application must not strobe more than once in a single window time.
A violation of any of these rules will trigger a User Watchdog Timer fault and result in shutting down any isolated power supplies and/or disabling any active drive outputs, as applicable for the specific module. Upon a User Watchdog Timer event, recovery to the module shutting down will require the module to be reset.
The Figure 1 and Figure 2 provides an overview and an example with actual values for the User Watchdog Timer Strobes, Quiet Time and Window. As depicted in the diagrams, there are two processes that run in parallel. The Strobe event starts the timer for the beginning of the “Quiet Time”. The timer for the Previous Strobe event continues to run to ensure that no additional Strobes are received within the “Window” associated with the Previous Strobe.
The optimal target for the user watchdog strobes should be at the interval of [Quiet time + ½ Window time] after the previous strobe, which will place the strobe in the center of the window. This affords the greatest margin of safety against unintended disablement in critical operations.
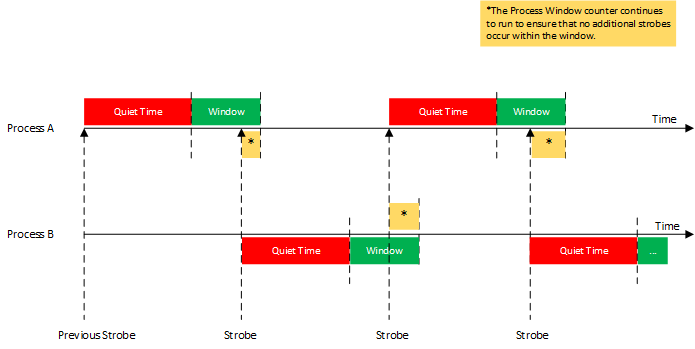
Figure 1. User Watchdog Timer Overview
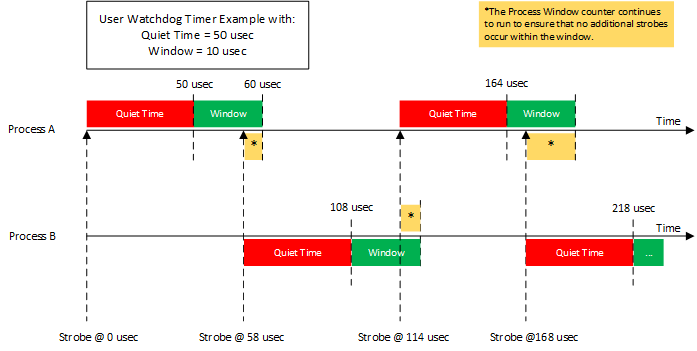
Figure 2. User Watchdog Timer Example
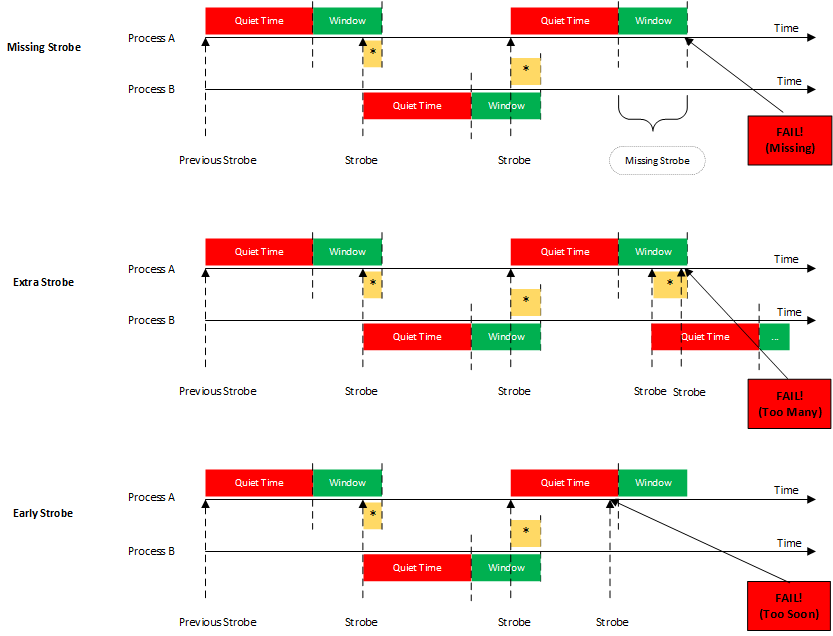
Figure 3. User Watchdog Timer Failures
Register Descriptions
The register descriptions provide the register name, Type, Data Range, Read or Write information, Initialized Value, and a description of the function.
User Watchdog Timer Registers
The registers associated with the User Watchdog Timer provide the ability to specify the UWDT Quiet Time and the UWDT Window that will be monitored to ensure that EXACTLY ONE User Watchdog Timer (UWDT) Strobe is written within the window.
UWDT Quiet Time |
|
Function: |
Sets Quiet Time value (in microseconds) to use for the User Watchdog Timer Frame. |
Type: |
unsigned binary word (32-bit) |
Data Range: |
0 µsec to 2^32 µsec (0x0 to 0xFFFFFFFF) |
Read/Write: |
R/W |
Initialized Value: |
0x0 |
Operational Settings: |
LSB = 1 µsec. The application must NOT write a strobe in the time between the previous strobe and the end of the Quiet time interval. In addition, the application must write in the UWDT Window EXACTLY ONCE. |
UWDT Window |
|
Function: |
Writes the window value (in microseconds) to be used for the User Watchdog Timer Frame. |
Type: |
unsigned binary word (32-bit) |
Data Range: |
0 µsec to 2^32 µsec (0x0 to 0xFFFFFFFF) |
Read/Write: |
R/W |
Initialized Value: |
0x0 |
Operational Settings: |
LSB = 1 µsec. The application must write the strobe once within the Window time after the end of the Quiet time interval. The application must write in the UWDT Window EXACTLY ONCE. This setting must be initialized to a non-zero value for operation and should allow sufficient tolerance for strobe timing by the application. |
UWDT Strobe |
|
Function: |
Writes the strobe value to be use for the User Watchdog Timer Frame. |
Type: |
unsigned binary word (32-bit) |
Data Range: |
0x55AA |
Read/Write: |
W |
Initialized Value: |
0x0 |
Operational Settings: |
At startup, the user watchdog is disabled. Write the value of 0x55AA to this register to start the user watchdog timer monitoring after initial power on or a reset. To prevent a disablement, the application must periodically write the strobe based on the user watchdog timer rules. |
Status and Interrupt
The modules that are capable of User Watchdog Timer support provide status registers for the User Watchdog Timer.
User Watchdog Timer Status
The status register that contains the User Watchdog Timer Fault information is also used to indicate channel Inter-FPGA failures on modules that have communication between FPGA components. There are four registers associated with the User Watchdog Timer Fault/Inter-FPGA Failure Status: Dynamic, Latched, Interrupt Enable, and Set Edge/Level Interrupt.
Function: |
Sets the corresponding bit (D31) associated with the channel’s User Watchdog Timer Fault error. |
Type: |
unsigned binary word (32-bit) |
Data Range: |
0x0000 0000 to 0xFFFF FFFF |
Read/Write: |
R (Dynamic), R/W (Latched, Interrupt Enable, Set Edge/Level Interrupt) |
Initialized Value: |
0 |
User Watchdog Timer Fault/Inter-FPGA Failure Dynamic Status |
||
User Watchdog Timer Fault/Inter-FPGA Failure Latched Status |
||
User Watchdog Timer Fault/Inter-FPGA Failure Interrupt Enable |
||
User Watchdog Timer Fault/Inter-FPGA Failure Set Edge/Level Interrupt |
||
Bit(s) |
Status |
Description |
D31 |
User Watchdog Timer Fault Status |
0 = No Fault |
D30:D0 |
Reserved for Inter-FPGA Failure Status |
Channel bit-mapped indicating channel inter FPGA communication failure detection. |
Interrupt Vector and Steering
When interrupts are enabled, the interrupt vector associated with the specific interrupt can be programmed (typically with a unique number/identifier) such that it can be utilized in the Interrupt Service Routine (ISR) to identify the type of interrupt. When an interrupt occurs, the contents of the Interrupt Vector registers is reported as part of the interrupt mechanism.
In addition to specifying the interrupt vector, the interrupt can be directed (“steered”) to the native bus or to the application running on the onboard ARM processor.
|
Note
|
the Interrupt Vector and Interrupt Steering registers are mapped to the Motherboard Common Memory and these registers are associated with the Module Slot position (refer to Function Register Map). |
Interrupt Vector |
|
Function: |
Set an identifier for the interrupt. |
Type: |
unsigned binary word (32-bit) |
Data Range: |
0 to 0xFFFF FFFF |
Read/Write: |
R/W |
Initialized Value: |
0 |
Operational Settings: |
When an interrupt occurs, this value is reported as part of the interrupt mechanism. |
Interrupt Steering |
|
Function: |
Sets where to direct the interrupt. |
Type: |
unsigned binary word (32-bit) |
Data Range: |
See table |
Read/Write: |
R/W |
Initialized Value: |
0 |
Operational Settings: |
When an interrupt occurs, the interrupt is sent as specified: |
Direct Interrupt to VME |
1 |
|
Direct Interrupt to ARM Processor (via SerDes) (Custom App on ARM or NAI Ethernet Listener App) |
2 |
Direct Interrupt to PCIe Bus |
5 |
Direct Interrupt to cPCI Bus |
6 |
Function Register Map
KEY
Configuration/Control |
Measurement/Status |
| USER WATCHDOG TIMER REGISTERS | |||||
|---|---|---|---|---|---|
OFFSET |
REGISTER NAME |
ACCESS |
OFFSET |
REGISTER NAME |
ACCESS |
0x01C0 |
UWDT Quiet Time |
R/W |
|||
0x01C4 |
UWDT Window |
R/W |
|||
0x01C8 |
UWDT Strobe |
R/W |
|||
STATUS REGISTERS |
|||||
*When an event is detected, the bit associated with the event is set in this register and will remain set until the user clears the event bit. Clearing the bit requires writing a 1 back to the specific bit that was set when read (i.e., write-1-to-clear, writing a “1” to a bit set to “1” will set the bit to “0”). |
|||||
OFFSET |
REGISTER NAME |
ACCESS |
OFFSET |
REGISTER NAME |
ACCESS |
0x09B0 |
Dynamic Status |
R |
|||
0x09B4 |
Latched Status* |
R/W |
|||
0x09B8 |
Interrupt Enable |
R/W |
|||
0x09BC |
Set Edge/Level Interrupt |
R/W |
|||
INTERRUPT REGISTERS |
|||||
The Interrupt Vector and Interrupt Steering registers are mapped to the Motherboard Memory Space and these addresses are absolute based on the module slot position. In other words, do not apply the Module Address offset to these addresses. |
|||||
OFFSET |
REGISTER NAME |
ACCESS |
OFFSET |
REGISTER NAME |
ACCESS |
0x056C |
Module 1 Interrupt Vector 28 - User Watchdog Timer Fault/Inter-FPGA Failure |
R/W |
0x066C |
Module 1 Interrupt Steering 28 - User Watchdog Timer Fault/Inter-FPGA Failure |
R/W |
0x076C |
Module 2 Interrupt Vector 28 - User Watchdog Timer Fault/Inter-FPGA Failure |
R/W |
0x086C |
Module 2 Interrupt Steering 28 - User Watchdog Timer Fault/Inter-FPGA Failure |
R/W |
0x096C |
Module 3 Interrupt Vector 28 - User Watchdog Timer Fault/Inter-FPGA Failure |
R/W |
0x0A6C |
Module 3 Interrupt Steering 28 - User Watchdog Timer Fault/Inter-FPGA Failure |
R/W |
0x0B6C |
Module 4 Interrupt Vector 28 - User Watchdog Timer Fault/Inter-FPGA Failure |
R/W |
0x0C6C |
Module 4 Interrupt Steering 28 - User Watchdog Timer Fault/Inter-FPGA Failure |
R/W |
0x0D6C |
Module 5 Interrupt Vector 28 - User Watchdog Timer Fault/Inter-FPGA Failure |
R/W |
0x0E6C |
Module 5 Interrupt Steering 28 - User Watchdog Timer Fault/Inter-FPGA Failure |
R/W |
0x0F6C |
Module 6 Interrupt Vector 28 - User Watchdog Timer Fault/Inter-FPGA Failure |
R/W |
0x106C |
Module 6 Interrupt Steering 28 - User Watchdog Timer Fault/Inter-FPGA Failure |
R/W |
REVISION HISTORY
Motherboard Manual - Status and Interrupts Revision History |
||
Revision |
Revision Date |
Description |
C |
2021-11-30 |
C08896; Transition manual to docbuilder format - no technical info change. |
DOCS.NAII REVISIONS
Revision Date |
Description |
2026-03-02 |
Formatting updates to document; no technical changes. |
MODULE COMMON REGISTERS
Edit this on GitLab
The registers described in this document are common to all NAI Generation 5 modules.
Module Information Registers
The registers in this section provide module information such as firmware revisions, capabilities and unique serial number information.
FPGA Version Registers
The FPGA firmware version registers include registers that contain the Revision, Compile Timestamp, SerDes Revision, Template Revision and Zynq Block Revision information.
FPGA Revision |
|
Function: |
FPGA firmware revision |
Type: |
unsigned binary word (32-bit) |
Data Range: |
0x0000 0000 to 0xFFFF FFFF |
Read/Write: |
R |
Initialized Value: |
Value corresponding to the revision of the board’s FPGA |
Operational Settings: |
The upper 16-bits are the major revision and the lower 16-bits are the minor revision. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Major Revision Number |
|||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Minor Revision Number |
|||||||||||||||
FPGA Compile Timestamp |
|
Function: |
Compile Timestamp for the FPGA firmware. |
Type: |
unsigned binary word (32-bit) |
Data Range: |
N/A |
Read/Write: |
R |
Initialized Value: |
Value corresponding to the compile timestamp of the board’s FPGA |
Operational Settings: |
The 32-bit value represents the Day, Month, Year, Hour, Minutes and Seconds as formatted in the table: |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
day (5-bits) |
month (4-bits) |
year (6-bits) |
hr |
||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
hour (5-bits) |
minutes (6-bits) |
seconds (6-bits) |
|||||||||||||
FPGA SerDes Revision |
|
Function: |
FPGA SerDes revision |
Type: |
unsigned binary word (32-bit) |
Data Range: |
0x0000 0000 to 0xFFFF FFFF |
Read/Write: |
R |
Initialized Value: |
Value corresponding to the SerDes revision of the board’s FPGA |
Operational Settings: |
The upper 16-bits are the major revision, and the lower 16-bits are the minor revision. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Major Revision Number |
|||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Minor Revision Number |
|||||||||||||||
FPGA Template Revision |
|
Function: |
FPGA Template revision |
Type: |
unsigned binary word (32-bit) |
Data Range: |
0x0000 0000 to 0xFFFF FFFF |
Read/Write: |
R |
Initialized Value: |
Value corresponding to the template revision of the board’s FPGA |
Operational Settings: |
The upper 16-bits are the major revision, and the lower 16-bits are the minor revision. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Major Revision Number |
|||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Minor Revision Number |
|||||||||||||||
FPGA Zynq Block Revision |
|
Function: |
FPGA Zynq Block revision |
Type: |
unsigned binary word (32-bit) |
Data Range: |
0x0000 0000 to 0xFFFF FFFF |
Read/Write: |
R |
Initialized Value: |
Value corresponding to the Zynq block revision of the board’s FPGA |
Operational Settings: |
The upper 16-bits are the major revision, and the lower 16-bits are the minor revision. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Major Revision Number |
|||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Minor Revision Number |
|||||||||||||||
Bare Metal Version Registers
The Bare Metal firmware version registers include registers that contain the Revision and Compile Time information.
Bare Metal Revision |
|
Function: |
Bare Metal firmware revision |
Type: |
unsigned binary word (32-bit) |
Data Range: |
0x0000 0000 to 0xFFFF FFFF |
Read/Write: |
R |
Initialized Value: |
Value corresponding to the revision of the board’s Bare Metal |
Operational Settings: |
The upper 16-bits are the major revision and the lower 16-bits are the minor revision. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Major Revision Number |
|||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Minor Revision Number |
|||||||||||||||
Bare Metal Compile Time |
|
Function: |
Provides an ASCII representation of the Date/Time for the Bare Metal compile time. |
Type: |
24-character ASCII string - Six (6) unsigned binary word (32-bit) |
Data Range: |
N/A |
Read/Write: |
R |
Initialized Value: |
Value corresponding to the ASCII representation of the compile time of the board’s Bare Metal |
Operational Settings: |
The six 32-bit words provide an ASCII representation of the Date/Time. The hexadecimal values in the field below represent: May 17 2019 at 15:38:32 |
|
Note
|
little-endian order of ASCII values |
Word 1 (Ex. 0x2079614D) |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Space (0x20) |
Month ('y' - 0x79) |
||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Month ('a' - 0x61) |
Month ('M' - 0x4D) |
||||||||||||||
Word 2 (Ex. 0x32203731) |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Year ('2' - 0x32) |
Space (0x20) |
||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Day ('7' - 0x37) |
Day ('1' - 0x31) |
||||||||||||||
Word 3 (Ex. 0x20393130) |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Space (0x20) |
Year ('9' - 0x39) |
||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Year ('1' - 0x31) |
Year ('0' - 0x30) |
||||||||||||||
Word 4 (Ex. 0x31207461) |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Hour ('1' - 0x31) |
Space (0x20) |
||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
'a' (0x74) |
't' (0x61) |
||||||||||||||
Word 5 (Ex. 0x38333A35) |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Minute ('8' - 0x38) |
Minute ('3' - 0x33) |
||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
':' (0x3A) |
Hour ('5' - 0x35) |
||||||||||||||
Word 6 (Ex. 0x0032333A) |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
NULL (0x00) |
Seconds ('2' - 0x32) |
||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Seconds ('3' - 0x33) |
':' (0x3A) |
||||||||||||||
FSBL Version Registers
The FSBL version registers include registers that contain the Revision and Compile Time information for the First Stage Boot Loader (FSBL).
FSBL Revision |
|
Function: |
FSBL firmware revision |
Type: |
unsigned binary word (32-bit) |
Data Range: |
0x0000 0000 to 0xFFFF FFFF |
Read/Write: |
R |
Initialized Value: |
Value corresponding to the revision of the board’s FSBL |
Operational Settings: |
The upper 16-bits are the major revision, and the lower 16-bits are the minor revision. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Major Revision Number |
|||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Minor Revision Number |
|||||||||||||||
FSBL Compile Time |
|
Function: |
Provides an ASCII representation of the Date/Time for the FSBL compile time. |
Type: |
24-character ASCII string - Six (6) unsigned binary word (32-bit) |
Data Range: |
N/A |
Read/Write: |
R |
Initialized Value: |
Value corresponding to the ASCII representation of the Compile Time of the board’s FSBL |
Operational Settings: |
The six 32-bit words provide an ASCII representation of the Date/Time. |
The hexadecimal values in the field below represent: May 17 2019 at 15:38:32
|
Note
|
little-endian order of ASCII values |
Word 1 (Ex. 0x2079614D) |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Space (0x20) |
Month ('y' - 0x79) |
||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Month ('a' - 0x61) |
Month ('M' - 0x4D) |
||||||||||||||
Word 2 (Ex. 0x32203731) |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Year ('2' - 0x32) |
Space (0x20) |
||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Day ('7' - 0x37) |
Day ('1' - 0x31) |
||||||||||||||
Word 3 (Ex. 0x20393130) |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Space (0x20) |
Year ('9' - 0x39) |
||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Year ('1' - 0x31) |
Year ('0' - 0x30) |
||||||||||||||
Word 4 (Ex. 0x31207461) |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Hour ('1' - 0x31) |
Space (0x20) |
||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
'a' (0x74) |
't' (0x61) |
||||||||||||||
Word 5 (Ex. 0x38333A35) |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Minute ('8' - 0x38) |
Minute ('3' - 0x33) |
||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
':' (0x3A) |
Hour ('5' - 0x35) |
||||||||||||||
Word 6 (Ex. 0x0032333A) |
|||||||||||||||
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
NULL (0x00) |
Seconds ('2' - 0x32) |
||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Seconds ('3' - 0x33) |
':' (0x3A) |
||||||||||||||
Module Serial Number Registers
The Module Serial Number registers include registers that contain the Serial Numbers for the Interface Board and the Functional Board of the module.
Interface Board Serial Number |
|
Function: |
Unique 128-bit identifier used to identify the interface board. |
Type: |
16-character ASCII string - Four (4) unsigned binary words (32-bit) |
Data Range: |
N/A |
Read/Write: |
R |
Initialized Value: |
Serial number of the interface board |
Operational Settings: |
This register is for information purposes only. |
Functional Board Serial Number |
|
Function: |
Unique 128-bit identifier used to identify the functional board. |
Type: |
16-character ASCII string - Four (4) unsigned binary words (32-bit) |
Data Range: |
N/A |
Read/Write: |
R |
Initialized Value: |
Serial number of the functional board |
Operational Settings: |
This register is for information purposes only. |
Module Capability |
|
Function: |
Provides indication for whether or not the module can support the following: SerDes block reads, SerDes FIFO block reads, SerDes packing (combining two 16-bit values into one 32-bit value) and floating point representation. The purpose for block access and packing is to improve the performance of accessing larger amounts of data over the SerDes interface. |
Type: |
unsigned binary word (32-bit) |
Data Range: |
0x0000 0000 to 0x0000 0107 |
Read/Write: |
R |
Initialized Value: |
0x0000 0107 |
Operational Settings: |
A “1” in the bit associated with the capability indicates that it is supported. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Flt-Pt |
0 |
0 |
0 |
0 |
0 |
Pack |
FIFO Blk |
Blk |
Module Memory Map Revision |
|
Function: |
Module Memory Map revision |
Type: |
unsigned binary word (32-bit) |
Data Range: |
0x0000 0000 to 0xFFFF FFFF |
Read/Write: |
R |
Initialized Value: |
Value corresponding to the Module Memory Map Revision |
Operational Settings: |
The upper 16-bits are the major revision and the lower 16-bits are the minor revision. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Major Revision Number |
|||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Minor Revision Number |
|||||||||||||||
Module Measurement Registers
The registers in this section provide module temperature measurement information.
Temperature Readings Registers
The temperature registers provide the current, maximum (from power-up) and minimum (from power-up) Zynq and PCB temperatures.
Interface Board Current Temperature |
|
Function: |
Measured PCB and Zynq Core temperatures on Interface Board. |
Type: |
signed byte (8-bits) for PCB and signed byte (8-bits) for Zynq core temperatures |
Data Range: |
0x0000 0000 to 0x0000 FFFF |
Read/Write: |
R |
Initialized Value: |
Value corresponding to the measured PCB and Zynq core temperatures based on the table below |
Operational Settings: |
The upper 16-bits are not used, and the lower 16-bits are the PCB and Zynq Core Temperatures. For example, if the register contains the value 0x0000 202C, this represents PCB Temperature = 32° Celsius and Zynq Temperature = 44° Celsius. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
PCB Temperature |
Zynq Core Temperature |
||||||||||||||
Functional Board Current Temperature |
|
Function: |
Measured PCB temperature on Functional Board. |
Type: |
signed byte (8-bits) for PCB |
Data Range: |
0x0000 0000 to 0x0000 00FF |
Read/Write: |
R |
Initialized Value: |
Value corresponding to the measured PCB on the table below |
Operational Settings: |
The upper 24-bits are not used, and the lower 8-bits are the PCB Temperature. For example, if the register contains the value 0x0000 0019, this represents PCB Temperature = 25° Celsius. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
PCB Temperature |
|||||||
Interface Board Maximum Temperature |
|
Function: |
Maximum PCB and Zynq Core temperatures on Interface Board since power-on. |
Type: |
signed byte (8-bits) for PCB and signed byte (8-bits) for Zynq core temperatures |
Data Range: |
0x0000 0000 to 0x0000 FFFF |
Read/Write: |
R |
Initialized Value: |
Value corresponding to the maximum measured PCB and Zynq core temperatures since power-on based on the table below |
Operational Settings: |
The upper 16-bits are not used, and the lower 16-bits are the maximum PCB and Zynq Core Temperatures. For example, if the register contains the value 0x0000 5569, this represents maximum PCB Temperature = 85° Celsius and maximum Zynq Temperature = 105° Celsius. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
PCB Temperature |
Zynq Core Temperature |
||||||||||||||
Interface Board Minimum Temperature |
|
Function: |
Minimum PCB and Zynq Core temperatures on Interface Board since power-on. |
Type: |
signed byte (8-bits) for PCB and signed byte (8-bits) for Zynq core temperatures |
Data Range: |
0x0000 0000 to 0x0000 FFFF |
Read/Write: |
R |
Initialized Value: |
Value corresponding to the minimum measured PCB and Zynq core temperatures since power-on based on the table below |
Operational Settings: |
The upper 16-bits are not used, and the lower 16-bits are the minimum PCB and Zynq Core Temperatures. For example, if the register contains the value 0x0000 D8E7, this represents minimum PCB Temperature = -40° Celsius and minimum Zynq Temperature = -25° Celsius. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
PCB Temperature |
Zynq Core Temperature |
||||||||||||||
Functional Board Maximum Temperature |
|
Function: |
Maximum PCB temperature on Functional Board since power-on. |
Type: |
signed byte (8-bits) for PCB |
Data Range: |
0x0000 0000 to 0x0000 00FF |
Read/Write: |
R |
Initialized Value: |
Value corresponding to the measured PCB on the table below |
Operational Settings: |
The upper 24-bits are not used, and the lower 8-bits are the PCB Temperature. For example, if the register contains the value 0x0000 0055, this represents PCB Temperature = 85° Celsius. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
PCB Temperature |
|||||||
Functional Board Minimum Temperature |
|
Function: |
Minimum PCB temperature on Functional Board since power-on. |
Type: |
signed byte (8-bits) for PCB |
Data Range: |
0x0000 0000 to 0x0000 00FF |
Read/Write: |
R |
Initialized Value: |
Value corresponding to the measured PCB on the table below |
Operational Settings: |
The upper 24-bits are not used, and the lower 8-bits are the PCB Temperature. For example, if the register contains the value 0x0000 00D8, this represents PCB Temperature = -40° Celsius. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
PCB Temperature |
|||||||
Higher Precision Temperature Readings Registers
These registers provide higher precision readings of the current Zynq and PCB temperatures.
Higher Precision Zynq Core Temperature |
|
Function: |
Higher precision measured Zynq Core temperature on Interface Board. |
Type: |
signed word (16-bits) for integer part and unsigned word (16-bits) for fractional part |
Data Range: |
0x0000 0000 to 0xFFFF FFFF |
Read/Write: |
R |
Initialized Value: |
Measured Zynq Core temperature on Interface Board |
Operational Settings: |
The upper 16-bits represent the signed integer part of the temperature and the lower 16-bits represent the fractional part of the temperature with the resolution of 1/1000 of degree Celsius. For example, if the register contains the value 0x002B 0271, this represents Zynq Core Temperature = 43.625° Celsius, and value 0xFFF6 0177 represents -10.375° Celsius. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Signed Integer Part of Temperature |
|||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Fractional Part of Temperature |
|||||||||||||||
Higher Precision Interface PCB Temperature |
|
Function: |
Higher precision measured Interface PCB temperature. |
Type: |
signed word (16-bits) for integer part and unsigned word (16-bits) for fractional part |
Data Range: |
0x0000 0000 to 0xFFFF FFFF |
Read/Write: |
R |
Initialized Value: |
Measured Interface PCB temperature |
Operational Settings: |
The upper 16-bits represent the signed integer part of the temperature and the lower 16-bits represent the fractional part of the temperature with the resolution of 1/1000 of degree Celsius. For example, if the register contains the value 0x0020 007D, this represents Interface PCB Temperature = 32.125° Celsius, and value 0xFFE8 036B represents -24.875° Celsius. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Signed Integer Part of Temperature |
|||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Fractional Part of Temperature |
|||||||||||||||
Higher Precision Functional PCB Temperature |
|
Function: |
Higher precision measured Functional PCB temperature. |
Type: |
signed word (16-bits) for integer part and unsigned word (16-bits) for fractional part |
Data Range: |
0x0000 0000 to 0xFFFF FFFF |
Read/Write: |
R |
Initialized Value: |
Measured Functional PCB temperature |
Operational Settings: |
The upper 16-bits represent the signed integer part of the temperature and the lower 16-bits represent the fractional part of the temperature with the resolution of 1/100 of degree Celsius. For example, if the register contains the value 0x0018 004B, this represents Functional PCB Temperature = 24.75° Celsius, and value 0xFFD9 0019 represents -39.25° Celsius. |
D31 |
D30 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
D19 |
D18 |
D17 |
D16 |
Signed Integer Part of Temperature |
|||||||||||||||
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
Fractional Part of Temperature |
|||||||||||||||
Module Health Monitoring Registers
The registers in this section provide module temperature measurement information. If the temperature measurements reaches the Lower Critical or Upper Critical conditions, the module will automatically reset itself to prevent damage to the hardware.
Module Sensor Summary Status |
|
Function: |
The corresponding sensor bit is set if the sensor has crossed any of its thresholds. |
Type: |
unsigned binary word (32-bits) |
Data Range: |
See table below |
Read/Write: |
R |
Initialized Value: |
0 |
Operational Settings: |
This register provides a summary for module sensors. When the corresponding sensor bit is set, the Sensor Threshold Status register for that sensor will indicate the threshold condition that triggered the event. |
Bit(s) |
Sensor |
D31:D6 |
Reserved |
D5 |
Functional Board PCB Temperature |
D4 |
Interface Board PCB Temperature |
D3:D0 |
Reserved |
Module Sensor Registers
The registers listed in this section apply to each module sensor listed for the Module Sensor Summary Status register. Each individual sensor register provides a group of registers for monitoring module temperatures readings. From these registers, a user can read the current temperature of the sensor in addition to the minimum and maximum temperature readings since power-up. Upper and lower critical/warning temperature thresholds can be set and monitored from these registers. When a programmed temperature threshold is crossed, the Sensor Threshold Status register will set the corresponding bit for that threshold. The figure below shows the functionality of this group of registers when accessing the Interface Board PCB Temperature sensor as an example.

Sensor Threshold Status |
|
Function: |
Reflects which threshold has been crossed |
Type: |
unsigned binary word (32-bits) |
Data Range: |
See table below |
Read/Write: |
R |
Initialized Value: |
0 |
Operational Settings: |
The associated bit is set when the sensor reading exceed the corresponding threshold settings. |
Bit(s) |
Description |
D31:D4 |
Reserved |
D3 |
Exceeded Upper Critical Threshold |
D2 |
Exceeded Upper Warning Threshold |
D1 |
Exceeded Lower Critical Threshold |
D0 |
Exceeded Lower Warning Threshold |
Sensor Current Reading |
|
Function: |
Reflects current reading of temperature sensor |
Type: |
Single Precision Floating Point Value (IEEE-754) |
Data Range: |
Single Precision Floating Point Value (IEEE-754) |
Read/Write: |
R |
Initialized Value: |
N/A |
Operational Settings: |
The register represents current sensor reading as a single precision floating point value. For example, for a temperature sensor, register value 0x41C6 0000 represents temperature = 24.75° Celsius. |
Sensor Minimum Reading |
|
Function: |
Reflects minimum value of temperature sensor since power up |
Type: |
Single Precision Floating Point Value (IEEE-754) |
Data Range: |
Single Precision Floating Point Value (IEEE-754) |
Read/Write: |
R |
Initialized Value: |
N/A |
Operational Settings: |
The register represents minimum sensor value as a single precision floating point value. For example, for a temperature sensor, register value 0x41C6 0000 represents temperature = 24.75° Celsius. |
Sensor Maximum Reading |
|
Function: |
Reflects maximum value of temperature sensor since power up |
Type: |
Single Precision Floating Point Value (IEEE-754) |
Data Range: |
Single Precision Floating Point Value (IEEE-754) |
Read/Write: |
R |
Initialized Value: |
N/A |
Operational Settings: |
The register represents maximum sensor value as a single precision floating point value. For example, for a temperature sensor, register value 0x41C6 0000 represents temperature = 24.75° Celsius. |
Sensor Lower Warning Threshold |
|
Function: |
Reflects lower warning threshold of temperature sensor |
Type: |
Single Precision Floating Point Value (IEEE-754) |
Data Range: |
Single Precision Floating Point Value (IEEE-754) |
Read/Write: |
R/W |
Initialized Value: |
Default lower warning threshold (value dependent on specific sensor) |
Operational Settings: |
The register represents sensor lower warning threshold as a single precision floating point value. For example, for a temperature sensor, register value 0xC220 0000 represents temperature = -40.0° Celsius. |
Sensor Lower Critical Threshold |
|
Function: |
Reflects lower critical threshold of temperature sensor |
Type: |
Single Precision Floating Point Value (IEEE-754) |
Data Range: |
Single Precision Floating Point Value (IEEE-754) |
Read/Write: |
R/W |
Initialized Value: |
Default lower critical threshold (value dependent on specific sensor) |
Operational Settings: |
The register represents sensor lower critical threshold as a single precision floating point value. For example, for a temperature sensor, register value 0xC25C 0000 represents temperature = -55.0° Celsius. |
Sensor Upper Warning Threshold |
|
Function: |
Reflects upper warning threshold of temperature sensor |
Type: |
Single Precision Floating Point Value (IEEE-754) |
Data Range: |
Single Precision Floating Point Value (IEEE-754) |
Read/Write: |
R/W |
Initialized Value: |
Default upper warning threshold (value dependent on specific sensor) |
Operational Settings: |
The register represents sensor upper warning threshold as a single precision floating point value. For example, for a temperature sensor, register value 0x42AA 0000 represents temperature = 85.0° Celsius. |
Sensor Upper Critical Threshold |
|
Function: |
Reflects upper critical threshold of temperature sensor |
Type: |
Single Precision Floating Point Value (IEEE-754) |
Data Range: |
Single Precision Floating Point Value (IEEE-754) |
Read/Write: |
R/W |
Initialized Value: |
Default upper critical threshold (value dependent on specific sensor) |
Operational Settings: |
The register represents sensor upper critical threshold as a single precision floating point value. For example, for a temperature sensor, register value 0x42FA 0000 represents temperature = 125.0° Celsius. |
FUNCTION REGISTER MAP
KEY
Configuration/Control |
Measurement/Status/Board Information |
| MODULE INFORMATION REGISTERS | |||||
|---|---|---|---|---|---|
OFFSET |
REGISTER NAME |
ACCESS |
OFFSET |
REGISTER NAME |
ACCESS |
0x003C |
FPGA Revision |
R |
0x0074 |
Bare Metal Revision |
R |
0x0030 |
FPGA Compile Timestamp |
R |
0x0080 |
Bare Metal Compile Time (Bit 0-31) |
R |
0x0034 |
FPGA SerDes Revision |
R |
0x0084 |
Bare Metal Compile Time (Bit 32-63) |
R |
0x0038 |
FPGA Template Revision |
R |
0x0088 |
Bare Metal Compile Time (Bit 64-95) |
R |
0x0040 |
FPGA Zynq Block Revision |
R |
0x008C |
Bare Metal Compile Time (Bit 96-127) |
R |
0x0090 |
Bare Metal Compile Time (Bit 128-159) |
R |
|||
0x0094 |
Bare Metal Compile Time (Bit 160-191) |
R |
|||
0x007C |
FSBL Revision |
R |
|||
0x00B0 |
FSBL Compile Time (Bit 0-31) |
R |
|||
0x00B4 |
FSBL Compile Time (Bit 32-63) |
R |
|||
0x00B8 |
FSBL Compile Time (Bit 64-95) |
R |
|||
0x00BC |
FSBL Compile Time (Bit 96-127) |
R |
|||
0x00C0 |
FSBL Compile Time (Bit 128-159) |
R |
|||
0x00C4 |
FSBL Compile Time (Bit 160-191) |
R |
|||
0x0000 |
Interface Board Serial Number (Bit 0-31) |
R |
0x0010 |
Functional Board Serial Number (Bit 0-31) |
R |
0x0034 |
Interface Board Serial Number (Bit 32-63) |
R |
0x0014 |
Functional Board Serial Number (Bit 32-63) |
R |
0x0008 |
Interface Board Serial Number (Bit 64-95) |
R |
0x0018 |
Functional Board Serial Number (Bit 64-95) |
R |
0x000C |
Interface Board Serial Number (Bit 96-127) |
R |
0x001C |
Functional Board Serial Number (Bit 96-127) |
R |
0x0070 |
Module Capability |
R |
|||
0x01FC |
Module Memory Map Revision |
R |
|||
MODULE MEASUREMENTS REGISTERS |
|||||
OFFSET |
REGISTER NAME |
ACCESS |
OFFSET |
REGISTER NAME |
ACCESS |
0x0200 |
Interface Board PCB/Zynq Current Temp |
R |
0x0208 |
Functional Board PCB Current Temp |
R |
0x0218 |
Interface Board PCB/Zynq Max Temp |
R |
0x0228 |
Functional Board PCB Max Temp |
R |
0x0220 |
Interface Board PCB/Zynq Min Temp |
R |
0x0230 |
Functional Board PCB Min Temp |
R |
0x02C0 |
Higher Precision Zynq Core Temperature |
R |
|||
0x02C4 |
Higher Precision Interface PCB Temperature |
R |
|||
0x02E0 |
Higher Precision Functional PCB Temperature |
R |
|||
MODULE HEALTH MONITORING REGISTERS |
|||||
OFFSET |
REGISTER NAME |
ACCESS |
OFFSET |
REGISTER NAME |
ACCESS |
0x07F8 |
Module Sensor Summary Status |
R |
|||
|
|||||

REVISION HISTORY
Motherboard Manual - Module Common Registers Revision History |
||
Revision |
Revision Date |
Description |
C |
2023-08-11 |
ECO C10649, initial release of module common registers manual. |
C1 |
2024-05-15 |
ECO C11522, removed Zynq Core/Aux/DDR Voltage register descriptions from Module Measurement Registers. Pg.16, updated Module Sensor Summary Status register to add PS references; updated Bit Table to change voltage/current bits to 'reserved'. Pg.16, updated Module/Power Supply Sensor Registers description to better describe register functionality and to add figure. Pg.17, added 'Exceeded' to threshold bit descriptions. Pg.17-18, removed voltage/current references from sensor descriptions. Pg.20, removed Zynq Core/Aux/DDR Voltage register offsets from Module Measurement Registers. Pg.20, updated Module Health Monitoring Registers offset tables. |
C2 |
2024-07-10 |
ECO C11701, pg.16, updated Module Sensor Summary Status register to remove PS references;updated Bit Table to change PS temperature bits to 'reserved'. Pg.16, updated Module SensorRegisters description to remove PS references. Pg.20, updated Module Health MonitoringRegisters offset tables to remove PS temperature register offsets. |
DOCS.NAII REVISIONS
Revision Date |
Description |
2025-11-05 |
Corrected register offsets for Interface Board Min Temp and Function Board Min & Max Temps. |
2026-03-02 |
Formatting updates to document; no technical changes. |
Revision History
Module Manual - DT3 Revision History
Revision |
Revision Date |
Description |
Module Manual - Status and Interrupts Revision History
Revision |
Revision Date |
Description |
||
C |
2021-11-30 C08896; |
Transition manual to docbuilder format - no technical info change. |
Module Manual - User Watchdog Timer Revision History
Revision |
Revision Date |
Description |
|||
C |
2021-11-30 |
C08896; Transition manual to docbuilder format - no technical info change. |
Module Manual - Module Common Registers Revision History
Revision |
Revision Date |
Description |
|||
C |
2023-08-11 ECO |
C10649, initial release of module common registers manual. |
NAI Cares
Edit this on GitLab
North Atlantic Industries (NAI) is a leading independent supplier of Embedded I/O Boards, Single Board Computers, Rugged Power Supplies, Embedded Systems and Motion Simulation and Measurement Instruments for the Military, Aerospace and Industrial Industries. We accelerate our clients’ time-to-mission with a unique approach based on a Configurable Open Systems Architecture™ (COSA®) that delivers the best of both worlds: custom solutions from standard COTS components.
We have built a reputation by listening to our customers, understanding their needs, and designing, testing and delivering board and system-level products for their most demanding air, land and sea requirements. If you have any applications or questions regarding the use of our products, please contact us for an expedient solution.
Please visit us at: www.naii.com or select one of the following for immediate assistance: