NAI is a leading manufacturer of products that support advanced control systems, including PWM servo motor drives. These drives primarily
provide precise power/current drive utilizing pulse-width modulation (PWM) technology. Servo motors are commonly used in industrial automation,
turret and imaging control, robotics, and other precision motion control systems. NAI’s PWM servo motor drives are designed for higher-power
and with external or built-in closed-loop feedback options, can achieve speed and position control of servo motors for performance motion control
applications.
For a brief description of the board and complete list of features, click here for the 68PW1 data sheet.
68PW1 Overview
The 68PW1 is a single-axis PWM servo motor drive. The 68PW1 offers high-performance motion control for a variety of industrial applications and
is designed for use in rugged environments. This 3U OpenVPX module is conduction-cooled and supports VPX profiles:
MOD3-PAY-2U2U-16.2.16-1
SLT3-PAY-2U2U-14.2.17
The 68PW1 PWM drive supports both 2-phase brushed and 3-phase brushless (BLDC) motor types. A 2-phase brushed motor is a type of DC
motor that uses a commutator and brushes to supply current to the rotor. It has a simple construction and is known for its low cost, high starting
torque, and ease of control. However, wear and tear to the brushes can limit its lifespan. A 3-phase brushless (BLDC) motor uses a permanent
magnet rotor and an electronic commutation system to provide more precise control and longer lifespan. It is more efficient, dependable, and
produces less noise and vibration than a brushed motor. However, its construction is more complex and expensive. BLDC motors are commonly
used in high-performance applications such as aerospace, automotive, and robotics.
From a single +28 VDC input source, the 68PW1 provides a programmable PWM output drive that can range from 24 V to 65 V. The card can
source up to 10 A of current, providing a maximum power output of 650 W. The drive also includes discrete drive-enable control pins and P2/P3
TE high-current blade connectors, ensuring reliable and secure motor control.
The 68PW1 features a range of ancillary I/O options, including:
Four (4) ±10V A/D channels, with the first channel input set by default for injection into the current command for debugging & analysis
purposes.
Four (4) ±10V D/A channels, which by default are configured as Channels 1 and 2 Feedback Current & Channels 1 and 2 Current
Command outputs for testing & analysis purposes.
One (1) RS-422/485 SDLC serial communication channel, which provides a high-speed communication interface for a range of control and
monitoring applications. For example, it can connect the drive to a remote controller or PLC, allowing for remote monitoring and control of
the motor.
One (1) RS-232 console/debug channel, which can be used for console or debug purposes, allowing for easy setup, and troubleshooting of
the drive. It can also interface with a local computer or other control device, allowing for direct control and monitoring of the motor.
One (1) 10/100BASE-T port, which provides a high-speed network connection for remote control and monitoring of the motor, as well as for
maintenance and diagnostics. For example, it can remotely monitor and adjust the motor’s performance, or provide real-time status
updates to a control system.
One (1) GbE (1000BASE-KX) port, which allows for remote control and monitoring of the motor drive system through an Ethernet
connection. For instance, a computer or other control device can access and control the motor drive over a local network, which can be
useful in situations where the motor drive is in a hard-to-reach location or needs remote monitoring for maintenance purposes. Additionally,
this option allows for integration of the motor drive with other networked devices in a larger system for centralized control and monitoring.
The 68PW1 motor drive also supports the following feedback and control options:
Hall, needed for BLDC motor commutation.
Resolver/Synchro + AC Reference, commonly used in applications where the motor is subjected to harsh environments and high shock or
vibration conditions, such as in military, aerospace, or oil drilling systems. This variety of feedback provides accurate positioning data with
excellent resistance to electrical interference.
Encoder, widely used in industrial automation and robotics applications that require precise control of the position and speed of a motor.
One example is in CNC machines where accurate control of the cutting tool is necessary to achieve high precision machining of parts.
The 68PW1 includes IPMC support for VITA 46.11 Tier-2, basic, compatible (configured option). The card is powered using +12V, ±12V AUX, and
+3.3V AUX inputs, with a typical power dissipation of 10 W and an estimated 96% efficiency for the PWM drive.
The modular and programmable architecture of the 68PW1 allows for flexible integration with a variety of systems and is supported by an
intelligent I/O library. It is suitable for use in both commercial and rugged applications, with an operating temperature range of -40º C to 85º C. In
addition, the drive’s mechanical envelope is ANSI/VITA 48 compatible with a 1.0” pitch, and has a weight of approximately 1.95 lbs.
SOFTWARE SUPPORT
The ENAIBL Software Support Kit (SSK) is supplied with all system platform-based board level products. This platform’s SSK contents include html format help documentation which defines board specific library functions and their respective parameter requirements. A board specific library and its source code is provided (module level ‘C’ and header files) to facilitate function implementation independent of user operating system (O/S). Portability files are provided to identify Board Support Package (BSP) dependent functions and help port code to other common system BSPs. With the use of the provided help documentation, these libraries are easily ported to any 32-bit O/S such as RTOS or Linux.
The latest version of a board specific SSK can be downloaded from our website www.naii.com in the software downloads section. A Quick-Start Software Manual is also available for download where the SSK contents are detailed, Quick-Start Instructions provided, and GUI applications are described therein. For other operating system support, contact factory.
SPECIFICATIONS
General for the Motherboard
Signal Logic Level:
Supports LVDS PCIe ver. 2.0 bus (x1)
Power (Motherboard):
`12V @ 900 mA (at no load conditions) ` `12V_AUX @ 45 mA ` -12V_AUX @ 45 mA + +3.3V_AUX @ 350 mA
Temperature, Operating:
"C" =0° C to `70° C ` "H" =-40° C to +85° C (see part number)
Storage Temperature:
-55° C to +105° C
Temperature Cycling:
Each board is cycled from -40° C to +85° C for options “C” or “H”
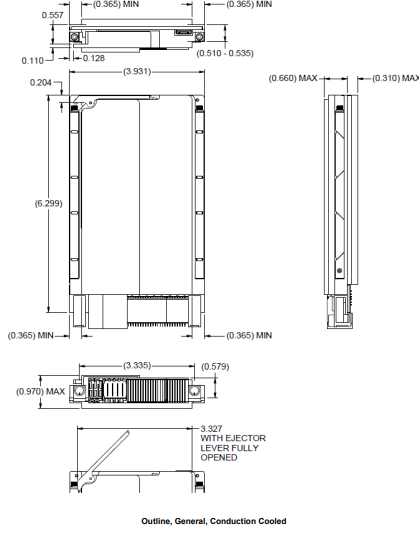
General size:
Height: 3.94" / 100 mm (3U) Width: 0.8" / 20.3 mm (4HP) or 1.0” / 25.4 mm (5 HP) air cooled front panel options Depth: 6.3“ / 160 mm deep
Weight:
1.95 lbs. (0.88 kg) (approx.) (conduction cooled)
Specifications are subject to change without notice.
Environmental
Unless otherwise specified, NAI board products are designed to meet the general Environmental Specifications as posted here:
The register map address consists of the following:
cPCI/PCIe BAR or Base Address for the Board
PWM Base Address
Function Offset Address
Board Base Address
The table below lists the BAR used for access to the motherboard and PWM registers. The second BAR is used internally for motherboard and
PWM firmware updates. The other cPCI/PCIe BARs not listed are not used.
NAI Boards
Device ID
Bus
Motherboard and Module Register Access
Motherboard and Module Firmware Updates
Slave Boards
68PW1
0x6888
PCIe
BAR 1 Size: Module Dependent (minimum 64K Bytes)
BAR 2 Size: 1M Bytes
PWM Slot and Function Addresses
The 68PW1 includes a preconfigured PWM drive embedded within the motherboard (onboard function). This onboard function is the equivalent of a standard NAI COSA smart function module. The “start” address of the onboard PWM function register area is factory pre-defined (and read from) the motherboard PWM Start Address register. Refer to page 65 for the complete PWM Function Register Map.
Address Calculation
Motherboard Registers:
Read/Write access to the motherboard registers starts with the base address for the board and then the motherboard base offset address.
For example, to address the onboard PWM Start Address register (i.e. register address = 0x0400):
Start with the base address for the board.
Add the motherboard base register address offset.
Motherboard Address =
Base Address Motherboard Address Offset
= 0x0000 0400
0x0000 0000 + 0x0400
PWM Registers:
Read/Write access to the onboard PWM’s registers start with the base address of the board. Add the “content” for the PWM Start Address and
then, add the specific onboard PWM function register offset.
For example, to address an appropriate/specific PWM with a register offset:
Start with the base address for the board.
Add the value (contents) from the onboard PWM base address offset register (contents/value of Motherboard Memory register for the
onboard PWM (i.e., @ 0x0400) = 0x4000.
Then add the specific PWM function Register Offset of interest (i.e., ADC Test Input Ch 1 @ 0x0200)
(PWM Function Specific) Address =
Base Address +
PWM Base Address Offset +
Function Register Offset
= 0x0000 4200
0x0000 0000
0x4000
0x0200
MOTHERBOARD REGISTER DESCRIPTIONS
PWM Information Registers
The PWM Addressing Ready, PWM Address, PWM Size and PWM ID provide information about the onboard PWM detected on the board.
PWM Addressing Ready
PWM Addressing Ready
Function:
Indicates that the onboard PWM is ready to be addressed.
Type:
unsigned binary word (32-bit)
Data Range:
0x0000 0000 to 0xFFFF FFFF
Read/Write:
R
Initialized Value:
0xA5A5A5A5
Operational Settings:
This register will contain the value of 0xA5A5A5A5 when the PWM address has been determined.
PWM Address
Function:
Specifies the Base Address for the onboard PWM.
Type:
unsigned binary word (32-bit)
Data Range:
0x0000 0000 to 0xFFFF FFFF
Read/Write:
R
Initialized Value:
Based on board's PWM configuration.
PWM Size
Function:
Specifies the Memory Size (in bytes) allocated for the onboard PWM.
Type:
unsigned binary word (32-bit)
Range:
0x0000 0000 to 0xFFFF FFFF
Read/Write:
R
Initialized Value:
Assigned by factory for the PWM.
PWM ID
Function:
Specifies the PWM ID for the onboard PWM.
Type:
4-character ASCII string
Data Range:
0x0000 0000 to 0xFFFF FFFF
Read/Write:
R
Initialized Value:
Assigned by factory for the PWM.
Operational Settings:
The PWM ID is formatted as four ASCII bytes: three characters followed by a space. The PWM ID is in little-endian order with a single space following the first three characters.
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
ASCII Character (ex: 'P' - 0x50)
ASCII Character (ex: 'W' - 0x57)
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
ASCII Character (ex: '1' - 0x31)
ASCII Space (' ' - 0x20)
Hardware Information Registers
The registers identified in this section provide information about the board’s hardware.
Product Serial Number
Function:
Specifies the Board Serial Number.
Type:
unsigned binary word (32-bit)
Data Range:
0x0000 0000 to 0xFFFF FFFF
Read/Write:
R
Initialized Value:
Serial number assigned by factory for the board.
Operational Settings:
N/A
Platform
Function:
Specifies the Board Platform Identifier. Values are for the ASCII characters for the NAI valid platforms (Identifiers).
Type:
unsigned binary word (32-bit)
Data Range:
See table below.
Read/Write:
R
Initialized Value:
ASCII code is for the Platform Identifier of the board.
Operational Settings:
Valid NAI platforms and the associated values for these platforms are shown below:
NAI Platform
Platform Identifier
ASCII Binary Values (Note: little-endian order of ascii values)
3U VPX
68
0x0000 3836
Model
Function:
Specifies the Board Model Identifier. Values are for the ASCII characters for the NAI valid models.
Type:
unsigned binary word (32-bit)
Data Range:
See table below.
Read/Write:
R
Initialized Value:
ASCII code is for the Model Identifier of the board.
Operational Settings:
Examples of NAI models and the associated values for these models are shown below:
NAI Model
ASCII Binary Values (Note: little-endian order of ascii values)
PW
0x0000 5057
Generation
Function:
Specifies the Board Generation. Identifier values are for the ASCII characters for the NAI valid generation identifiers.
Type:
unsigned binary word (32-bit)
Data Range:
See table below.
Read/Write:
R
Initialized Value:
ASCII code is for the Generation Identifier of the board.
Operational Settings:
Examples of NAI generations and the associated values for these generations are shown below:
NAI Generation
ASCII Binary Values (Note: little-endian order of ascii values)
1
0x0000 0031
Processor Count/Ethernet Interface Count
Function:
Specifies the Processor Count and Ethernet Count
Type:
unsigned binary word (32-bit)
Data Range:
See table below.
Read/Write:
R
Operational Settings:
Processor Count - Indicates the number of unique processor types on the motherboard. Ethernet Interface Count - Indicates the number of Ethernet interfaces on the product motherboard. For example, Single Ethernet = 1; Dual Ethernet = 2.
NAI Board
Processor Count
Description
3U-VPX
68PW1
1
Xilinx Zynq 7015
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
Processor Count (See Table)
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
Ethernet Count (Based on Part Number Ethernet Options)
Maximum Module Slot Count/ARM Platform Type
Function:
Specifies the Maximum Module Slot Count and ARM Platform Type.
Type:
unsigned binary word (32-bit)
Data Range:
See table below.
Read/Write:
R
Operational Settings:
Maximum Module Slot Count - Indicates the number of modules that can be installed on the product. ARM Platform - Altera = 1; Xilinx X1 = 2; Xilinx X2 = 3; UltraScale = 4 NOTE: The onboard PWM function is the equivalent of one (1) smart function module.
NAI Board
Processor Count
Description
3U-VPX
68PW1
1
Xilinx X2 = 3
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
Maximum Module Slot Count (See Table)
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
ARM Platform Type (See Table)
Motherboard Firmware Information Registers
The registers in this section provide information on the revision of the firmware installed on the motherboard.
Motherboard Core (MBCore) Firmware Version
Function:
Specifies the Version of the NAI factory provided Motherboard Core Application installed on the board.
Type:
Two (2) unsigned binary word (32-bit)
Data Range:
0x0000 0000 to 0xFFFF FFFF
Read/Write:
R
Operational Settings:
The motherboard firmware version consists of four components: Major, Minor, Minor 2, and Minor 3.
Motherboard Core Firmware Version (Note: little-endian order in register) (ex. 4.7.0.0)
Word 1 (Ex. 0007 0004 = 4.7 (Major.Minor)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
Minor (ex: 0x0007 = 7)
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
Major (ex: 0x0004 = 4)
Word 2 (Ex. 0x0000 0000 = 0000 = 0.0 (Minor2.Minor3))
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
Minor 3 (ex: 0x000 = 0)
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
Minor 2 (ex: 0x000 = 0)
Motherboard Firmware Build Time/Date
Function:
Specifies the Build Date/Time of the NAI factory provided Motherboard Core Application installed on the board.
Type:
Two (2) unsigned binary word (32-bit)
Data Range:
N/A
Read/Write:
R
Operational Settings:
The motherboard firmware time consists of the Build Date and Build Time. NOTE: On some builds the Date/Time fields are fixed to 0000 0000 to maintain binary consistency across builds.
Motherboard Firmware Build Time (Note: little-endian order in register)
Word 1 - Build Date (ex. 0x030C 07E2 = 2018-12-03)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
Day (ex: 0x03 = 3)
Month (ex: 0x0C = 12)
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
Year (ex: 0x07E2 = 2018)
Word 2 - Build Time (ex. 0x001B 3B0A = 10:59:27)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
null (0x00)
Seconds (ex: 0x1B = 27)
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
Minutes (ex: 0x3B = 59)
Hours (ex: 0x0A = 10)
Motherboard FPGA Revision
Function:
Specifies the revision of the NAI factory provided Motherboard FPGA installed on the board.
Type:
unsigned binary word (32-bit)
Data Range:
0x0000 0000 to 0xFFFF FFFF
Read/Write:
R
Operational Settings:
The motherboard FPGA revision consists of two components: Major, Minor.
Motherboard FPGA Revision (ex. 0x0005 0008 = 5.8)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
Major (ex: 0x0005 = 5)
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
Minor (ex: 0x0008 = 8)
Motherboard FPGA Compile Date/Time
Function:
Specifies the Compile Date/Time of the NAI factory provided Motherboard FPGA installed on the board.
Type:
unsigned binary word (32-bit)
Data Range:
N/A
Read/Write:
R
Operational Settings:
The motherboard FPGA time consists of the Build Date and Time in the following format:
Motherboard FPGA Compile Time (ex. 0xD12A 01B8 = 02/26/21 00:06:56)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
Day (D31:D27)
Month (D26:D23)
Year (D22:D17)
ex. 0xD
ex. 0x1
0x2
0xA
1
1
0
1
0
0
0
1
0
0
1
0
1
0
1
0
Day = 0x1A = 26
Month = 0x2 = 2
Year = 0x15 = 21
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
Hour (D16:D12)
Minutes (D11:D6)
Seconds (D5:D0)
ex. 0x0
ex. 0x1
ex. 0xB
ex. 0x8
0
0
0
0
0
0
0
1
1
0
1
1
1
0
0
0
Hour = 0x00 = 0
Minutes = 0x06
Seconds = 0x38 = 56
Motherboard Monitoring Registers
The registers in this provide motherboard temperature measurement information, and where applicable the host processor and slave processor
measurements.
NAI Boards
Bus
Has Host Processor
Has Slave Processor
Slave Boards
68PW1
PCIe
No
No
Temperature Readings Register
The temperature registers provide the current, maximum (from power-up) and minimum (from power-up) for the processor and PCB for Zynq processor.
These registers are only available on Xilinx Generation 5 platforms, and are periodically populated by the motherboard core application, which only runs in Petalinux and BareMetal. For other operating systems, refer to the naibrd Software Support Kit (SSK) naibsp_system_Monitor_Temperature_Get() routine to manually retrieve the temperature (NOTE: this feature is typically utilized for development/factory use only; contact the factory for additional details on potential use, if required).
Temperature Readings Register
Function:
Specifies the Measured Temperatures on Motherboard.
Type:
signed byte (8-bits) for each temperature reading – Six (6) 32-bit words
Data Range:
0x0000 0000 to 0x0000 FFFF
Read/Write:
R
Initialized Value:
Value corresponding to the measured temperatures based on the table below.
Operational Settings:
The 8-bit temperature readings are signed bytes. For example, if the following register contains the value 0x6955 0000:
Word 3 (Max Zynq Temperatures)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
Max Zynq Core Temperature
Max Zynq PCB Temperature
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
0x00
0x00
The values would represent the following temperatures:
Temperature Measurements
Data Bits
Value
Temperature (Celsius)
Max Zynq Core Temperature
D31:D24
0x69
+105°
Max Zynq PCB Temperature
D23:D16
0x55
+85°
Temperature Readings
Word 1 (Current Zynq Temperatures)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
Zynq Core Temperature
Zynq PCB Temperature
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
0x00
0x00
Word 2 (Reserved)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0x00
0x00
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
0x00
0x00
Word 3 (Max Zynq Temperatures)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
Zynq Core Max
Temp Zynq PCB Max Temp
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
0x00
0x00
Word 4 (Reserved)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0x00
0x00
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Word 5 (Min Zynq Temperatures)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
Min Zynq Core Temperature
Min Zynq PCB Temperature
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Word 6 (Reserved)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0x00
0x00
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Higher Precision Temperature Readings Register
These registers provide higher precision readings of the current Zynq and PCB temperatures.
Higher Precision Zynq Core Temperature
Function:
Specifies the Higher Precision Measured Zynq Core temperature on Interface Board.
Type:
signed word (16-bits) for integer part and unsigned word (16-bits) for fractional part
Data Range:
0x0000 0000 to 0xFFFF FFFF
Read/Write:
R
Initialized Value:
Measured Zynq Core temperature on Interface Board.
Operational Settings:
The upper 16-bits represent the signed integer part of the temperature, and the lower 16-bits represent the fractional part of the temperature with the resolution of 1/1000 of degree Celsius. For example, if the register contains the value 0x002B 0271, this represents Zynq Core Temperature = 43.625° Celsius, and value 0xFFF6 0177 represents -10.375° Celsius.
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
Signed Integer Part of Temperature
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
Fractional Part of Temperature
Higher Precision Motherboard PCB Temperature
Function:
Specifies the Higher Precision Measured Motherboard PCB temperature.
Type:
signed word (16-bits) for integer part and unsigned word (16-bits) for fractional part
Data Range:
0x0000 0000 to 0xFFFF FFFF
Read/Write:
R
Initialized Value:
Measured Motherboard PCB temperature.
Operational Settings:
The upper 16-bits represent the signed integer part of the temperature, and the lower 16-bits represent the fractional part of the temperature with the resolution of 1/1000 of degree Celsius. For example, if the register contains the value 0x0020 007D, this represents Interface PCB Temperature = 32.125° Celsius, and value 0xFFE8 036B represents -24.875° Celsius.
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
Signed Integer Part of Temperature
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
Fractional Part of Temperature
Motherboard Health Monitoring Registers
The registers in this section provide a summary of motherboard temperature sensors and their corresponding bits. Additionally, this section provides an overview of the registers allocated to those sensors, which are used to monitor current/minimum/maximum temperature readings, upper & lower critical/warning temperature thresholds, and whether or not a programmed temperature threshold has been exceeded.
These registers are only available on Xilinx Generation 5 platforms, and are periodically populated by the motherboard core application, which only runs in Petalinux and BareMetal. For other operating systems, refer to the naibrd Software Support Kit (SSK) naibsp_system_Monitor_Temperature_Get() routine to manually retrieve the temperature (NOTE: this feature is typically utilized for development/factory use only; contact the factory for additional details on potential use, if required).
Motherboard Sensor Summary Alarm
Function:
The corresponding sensor bit is set if the sensor has crossed any of its thresholds.
Type:
unsigned binary word (32-bits)
Data Range:
See table below
Read/Write:
R
Initialized Value:
0
Operational Settings:
This register provides a summary for motherboard sensors. When the corresponding sensor bit is set, the Sensor Threshold Status register for that sensor will indicate the threshold condition that triggered the event.
The registers listed in this section apply to each module sensor listed for the Motherboard Sensor Summary Status register. Each individual sensor register provides a group of registers for monitoring motherboard temperatures readings. From these registers, a user can read the current temperature of the sensor in addition to the minimum and maximum temperature readings since power-up. Upper and lower critical/warning temperature thresholds can be set and monitored from these registers. When a programmed temperature threshold is crossed, the Sensor Threshold Status register will set the corresponding bit for that threshold. The figure below shows the functionality of this group of registers when accessing the Zynq Core Temperature sensor as an example.
The register represents current sensor reading as a single precision floating point value. For example, for a temperature sensor, register value 0x41C6 0000 represents temperature = 24.75° Celsius.
Reflects minimum value of temperature sensor since power up
Type:
Single Precision Floating Point Value (IEEE-754)
Data Range:
Single Precision Floating Point Value (IEEE-754)
Read/Write:
R
Initialized Value:
N/A
Operational Settings:
The register represents minimum sensor value as a single precision floating point value. For example, for a temperature sensor, register value 0x41C6 0000 represents temperature = 24.75° Celsius.
Reflects maximum value of temperature sensor since power up
Type:
Single Precision Floating Point Value (IEEE-754)
Data Range:
Single Precision Floating Point Value (IEEE-754)
Read/Write:
R
Initialized Value:
N/A
Operational Settings:
The register represents maximum sensor value as a single precision floating point value. For example, for a temperature sensor, register value 0x41C6 0000 represents temperature = 24.75° Celsius.
Reflects lower warning threshold of temperature sensor
Type:
Single Precision Floating Point Value (IEEE-754)
Data Range:
Single Precision Floating Point Value (IEEE-754)
Read/Write:
R/W
Initialized Value:
Default lower warning threshold (value dependent on specific sensor)
Operational Settings:
The register represents sensor lower warning threshold as a single precision floating point value. For example, for a temperature sensor, register value 0xC220 0000 represents temperature = -40.0° Celsius.
Reflects lower critical threshold of temperature sensor
Type:
Single Precision Floating Point Value (IEEE-754)
Data Range:
Single Precision Floating Point Value (IEEE-754)
Read/Write:
R/W
Initialized Value:
Default lower critical threshold (value dependent on specific sensor)
Operational Settings:
The register represents sensor lower critical threshold as a single precision floating point value. For example, for a temperature sensor, register value 0xC25C 0000 represents temperature = -55.0° Celsius.
Reflects upper warning threshold of temperature sensor
Type:
Single Precision Floating Point Value (IEEE-754)
Data Range:
Single Precision Floating Point Value (IEEE-754)
Read/Write:
R/W
Initialized Value:
Default upper warning threshold (value dependent on specific sensor)
Operational Settings:
The register represents sensor upper warning threshold as a single precision floating point value. For example, for a temperature sensor, register value 0x42AA 0000 represents temperature = 85.0° Celsius.
Reflects upper critical threshold of temperature sensor
Type:
Single Precision Floating Point Value (IEEE-754)
Data Range:
Single Precision Floating Point Value (IEEE-754)
Read/Write:
R/W
Initialized Value:
Default upper critical threshold (value dependent on specific sensor)
Operational Settings:
The register represents sensor upper critical threshold as a single precision floating point value. For example, for a temperature sensor, register value 0x42FA 0000 represents temperature = 125.0° Celsius.
The registers in this section provide information about the Ethernet Configuration for the two ports on the board.
Important: Regardless if the board is configured for one or two Ethernet ports, the second IP address cannot be on the same Subnet as the First IP Address. The table below provides examples of valid and invalid IP Addresses and Subnet Mask Addresses.
Specifies the Ethernet IPv6 Address for the Ethernet port.
Type:
Five (5) unsigned binary word (32-bit)
Data Range:
See table.
Read/Write:
R
Operational Settings:
The IPv6 Prefix length indicates the network portion of an IPv6 address using the following format: IPv6 address/prefix length ` Prefix length can range from 0 to 128 ` * Typical prefix length is 64
The following is an illustration of IPv6 addressing with IPv6 Prefix length of 64.
64 bits
64 bits
Prefix
Interface ID
Prefix 1
Prefix 2
Prefix 3
Subnet ID
Interface ID 1
Interface ID 2
Interface ID 3
Interface ID 4
Example: 2002:c0a8:101:0:7c99:d118:9058:1235/64
2002
C0A8
0101
0000
7C99
D118
9058
1235
Ethernet IPv6 Address (Note: little-endian order within 32-bit and 16-bit words in register) (ex. IPv6 Address: 2002:c0a8:201:0:7c99:d118:9058:1235 IPv6 Prefix: 64)
When interrupts are enabled, the interrupt vector associated with the specific interrupt can be programmed (typically with a unique number/identifier) such that it can be utilized in the Interrupt Service Routine (ISR) to identify the type of interrupt. When an interrupt occurs, the contents of the Interrupt Vector registers is reported as part of the interrupt mechanism.
In addition to specifying the interrupt vector, the interrupt can be directed (“steered”) to the native bus or to the application running on the onboard ARM processor.
Note
The Interrupt Vector and Interrupt Steering registers are mapped to the Motherboard Common Memory and these registers are associated with the Module Slot position (refer to Function Register Map).
Interrupt Vector
Function:
Set an identifier for the interrupt.
Type:
unsigned binary word (32-bit)
Data Range:
0x0000 0000 to 0xFFFF FFFF
Read/Write:
R/W
Initialized Value:
0
Operational Settings:
When an interrupt occurs, this value is reported as part of the interrupt mechanism.
Interrupt Steering
Function:
Sets where to direct the interrupt.
Type:
unsigned binary word (32-bit)
Data Range:
See table
Read/Write:
R/W
Initialized Value:
0
Operational Settings:
When an interrupt occurs, the interrupt is sent as specified:
Direct Interrupt to VME
1
Direct Interrupt to ARM Processor (via SerDes) + (Custom App on ARM or NAI Ethernet Listener App)
Provides the ability to command the onboard PWM to Reset, Power-down, or Power-up.
Type:
unsigned binary word (32-bit)
Data Range:
0x0000 0000 to 0xFFFF FFFF
Read/Write:
R/W
Operational Settings:
The PWM Control Commands registers provide the ability to request the onboard PWM to perform one of the following functions - Reset, Power-down, Power-up. Only one command can be requested at a time. For example, one cannot request a Reset and a Power-down at the same time. Once the command is recognized and handled, the bit will be cleared. NOTE: Clearing of the command request bit only indicates the command has been recognized and initiated, it does not indicate that the command action has been completed. There is one Control Command Request register. The register is Bit-mapped as shown in the table below:
Bit(s)
Description
D31:D3
Reserved
D2
PWM Power-up
D1
PWM Power-down
D0
PWM Reset
PWM Health Monitoring Registers
PWM Communications Status
Function:
Provides the ability to monitor factors that may affect the communication status of the PWM.
Type:
unsigned binary word (32-bit)
Data Range:
0x0000 0000 to 0xFFFF FFFF
Read/Write:
R
Operational Settings:
The PWM Communications register provide the ability to monitor factors that may affect the Communications Status of the onboard PWM. Each communication factor is bit mapped to the register as shown in the table below:
Bit(s)
Description
D31:D5
Reserved
D4
PWM Communications Error Detected
D3
PWM Firmware Not Ready
D2
PWM LinkInit Not Done
D1
PWM Not Detected
D0
PWM Powered-down
PWM Powered-down:
The user can request the onboard PWM be powered-down (see PWM Control Command Requests). Once the request is detected and acted upon, this bit will be set. Once powered-down, you will not be able to communicate with the PWM.
PWM Not Detected:
If the onboard PWM has not been detected, you will not be able to communicate with the PWM.
PWM LinkInit Not Done:
PWM communications is accomplished via SERDES. LinkInit is required to establish a connection to the onboard PWM. If the LinkInit has not been successfully completed, you will not be able to communicate with the PWM.
PWM Firmware Not Ready:
The onboard PWM has Firmware that is ready from PWM QSPI and loaded for execution. If this Firmware was not loaded and started successfully, you may not be able to communicate with the PWM.
PWM Communications Error Detected:
If at some point during run-time, communications with the onboard PWM have failed, this bit will be set.
PWM BIT Status
Function:
Provides the ability to monitor the onboard PWM BIT Status.
Type:
unsigned binary word (32-bit)
Data Range:
0x0000 0000 to 0xFFFF FFFF
Read/Write:
R
Operational Settings:
The PWM BIT Status registers provide the ability to monitor the onboard PWM BIT results as Latched and current value. A 1 is any bit field indicates BIT failure for the PWM.
Bit(s)
Description
D31:D18
Reserved
D17
PWM BIT Failure (current value)
D16
Reserved
D15:D2
Reserved
D1
PWM BIT Failure - Latched
D0
Reserved
Scratchpad Area
Scratchpad Area
Function:
Registers reserved as scratch pad for customer use.
Type:
unsigned binary word (32-bit)
Data Range:
0x0000 0000 to 0xFFFF FFFF
Read/Write:
R/W
Operational Settings:
This area in memory is reserved for customer use.
MOTHERBOARD FUNCTION REGISTER MAP
KEY
Configuration/Control
Measurement/Status/Board Information
PWM INFORMATION REGISTERS
OFFSET
REGISTER NAME
ACCESS
OFFSET
REGISTER NAME
ACCESS
0x03FC
PWM Addressing Ready
R
0x0400
PWM Slot 1 Address
R
0x0430
PWM Slot 1 Size
R
0x0460
PWM Slot 1 ID
R
HARDWARE INFORMATION REGISTERS
OFFSET
REGISTER NAME
ACCESS
OFFSET
REGISTER NAME
ACCESS
0x0020
Product Serial Number
R
0x0024
Platform
R
0x0030
Processor Count/Ethernet Count
R
0x0028
Model
R
0x0034
Maximum Module Slot Count/ARM Platform Type
R
0x002C
Generation
R
MOTHERBOARD FIRMWARE INFORMATION REGISTERS
OFFSET
REGISTER NAME
ACCESS
OFFSET
REGISTER NAME
ACCESS
Motherboard Core Information
Motherboard FPGA Information
0x0100
MB Core Major/Minor Version
R
0x0270
MB FPGA Revision
R
0x0104
MB Core Minor 2/3 Version
R
0x0274
MB FPGA Compile Date/Time
R
0x0108
MB Core Build Date
R
MOTHERBOARD MONITORING REGISTERS
OFFSET
REGISTER NAME
ACCESS
OFFSET
REGISTER NAME
ACCESS
Temperature Readings
High Precision Temperature Readings
0x0200
Current Zynq Temperatures
R
0x0230
Current Zynq Core Temperature
R
0x0204
Reserved
R
0x0234
Current Zynq PCB Temperature
R
0x0208
Max Zynq Temp
R
0x020C
Reserved
R
0x0210
Min Zynq Temperatures
R
0x0214
Reserved
R
MOTHERBOARD HEALTH MONITORING REGISTERS
OFFSET
REGISTER NAME
ACCESS
OFFSET
REGISTER NAME
ACCESS
0x20F8
Motherboard Sensor Summary Status
R

ETHERNET CONFIGURATION REGISTERS
OFFSET
REGISTER NAME
ACCESS
OFFSET
REGISTER NAME
ACCESS
ETHERNET A (LEFT) / ETHERNET B (RIGHT)
0x0070
Ethernet A MAC (Octets 1-4)
R
0x00A0
Ethernet B MAC (Octets 1-4)
R
0x0074
Ethernet A MAC (Octets 5-6)/Misc Settings
R
0x00A4
Ethernet B MAC (Octets 5-6)/Misc Settings
R
0x0078
Ethernet A Interface Name (Bit 0-31)
R
0x00A8
Ethernet B Interface Name (Bit 0-31)
R
0x007C
Ethernet A Interface Name (Bit 32-63)
R
0x00AC
Ethernet B Interface Name (Bit 32-63)
R
0x0080
Ethernet A IPv4 Address
R
0x00B0
Ethernet B IPv4 Address
R
0x0084
Ethernet A IPv4 Subnet Mask
R
0x00B4
Ethernet B IPv4 Subnet Mask
R
0x0088
Ethernet A IPv4 Gateway
R
0x00B8
Ethernet B IPv4 Gateway
R
0x008C
Ethernet A IPv6 Address (Prefix 1-2)
R
0x00BC
Ethernet B IPv6 Address (Prefix 1-2)
R
0x0090
Ethernet A IPv6 Address (Prefix 3/Subnet ID)
R
0x00C0
Ethernet B IPv6 Address (Prefix 3/Subnet ID)
R
0x0094
Ethernet A IPv6 Address (Interface ID 1-2)
R
0x00C4
Ethernet B IPv6 Address (Interface ID 1-2)
R
0x0098
Ethernet A IPv6 Address (Interface ID 3-4)
R
0x00C8
Ethernet B IPv6 Address (Interface ID 3-4)
R
0x009C
Ethernet A IPv6 Prefix Length
R
0x00CC
Ethernet B IPv6 Prefix Length
R
INTERRUPT REGISTERS
OFFSET
REGISTER NAME
ACCESS
OFFSET
REGISTER NAME
ACCESS
0x0500 - 0x057C
PWM 1 Interrupt Vector 1 - 32
R/W
0x0600 - 0x067C
PWM 1 Interrupt Steering 1 - 32
R/W
MODULE CONTROL COMMAND REQUEST REGISTERS
OFFSET
REGISTER NAME
ACCESS
OFFSET
REGISTER NAME
ACCESS
0x01D8
PWM Command Request
R/W
MODULES HEALTH MONITORING REGISTERS
OFFSET
REGISTER NAME
ACCESS
OFFSET
REGISTER NAME
ACCESS
0x01B8
PWM Communications Status
R
0x0128
PWM BIT Status (current and latched)
R
SCRATCHPAD REGISTERS
OFFSET
REGISTER NAME
ACCESS
OFFSET
REGISTER NAME
ACCESS
0x3800 - 0x3BFF
Scratchpad Registers
R/W
PWM CARD REGISTER DESCRIPTIONS
Board Information Registers
The registers identified in this section provide information about the PWM’s FPGA revision.
FPGA Revision
Function:
Specifies the major and minor revision of the FPGA.
Type:
other
Data Range:
0x0000 to 0xFFFF
Read/Write:
R
Initialized Value:
N/A.
Operational Settings:
The upper byte equals the Major Revision. The lower byte equals the Minor Revision. Example: 0x0202 = rev 2.2.
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Major Revision
Minor Revision
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
FPGA Sub-Revision
Function:
Specifies the sub-revision of the FPGA.
Type:
other
Data Range:
0x0000 to 0xFFFF
Read/Write:
R
Initialized Value:
N/A
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
PWM Standard Operation Registers
The registers identified in this section provide information about PWM Channel Control, DAC Control, ADC Control, Measurement and Status Registers.
PWM Channel Control Registers
Current Command
Function:
Latches its value to the drive command when the module is operating in current mode.
Type:
signed binary word (32-bit)
Data Range:
0xF800 to 0x07FF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
The command is a 12-bit signed integer and is mapped into the LSB's of a 16-bit register with sign bit extension.
Minimum value
F800: -8.500A
Maximum value
07FF: +8.496A
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Voltage Command
Function:
Latches its value to the drive command when the module is operating in voltage mode.
Type:
signed binary word (32-bit)
Data Range:
0xF800 to 0x07FF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
The command is a 12-bit signed integer and is mapped into the LSB's of a 16-bit register with sign bit extension.
Minimum value
F800: -80.000V
Maximum value
07FF: +79.961V
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Drive Enable
Function:
Provides enable/disable control of the channel output stage.
Type:
boolean
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000 (disabled)
Operational Settings:
N/A
Drive enabled/disabled
0000: Drive disabled + Other: Drive enabled
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Note
writing to the Drive Reset register does NOT clear this register
Drive Reset
Function:
Used to clear all fail conditions related to the channel output in the Status Register.
Type:
boolean
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000 (inactive)
Operational Settings:
N/A
Drive reset
0000: Reset inactive + Other: Reset active
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Note
A write to this register is not latched. The register will be cleared to its default value after a successful write.
Note
A write to this register does not modify the Drive Enable register.
Note
in the event of a shut-down fault condition the channel will be disabled. To restore normal operation, write the appropriate value to this register. If on-board faults are resolved, normal operation will be restored.
DAC Control
DAC Test Word 1
Function:
Provides bus read access to the RS-422 SDLC receive date for DAC test word #1.
Type:
signed binary word (32-bit)
Data Range:
0xF800 to 0x07FF
Read/Write:
R
Initialized Value:
0x0000
Operational Settings:
N/A
Minimum value
F800: -2048 (-10V)
Maximum value
07FF: 2047 (9.995V)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Note
If no test word is transmitted or if an error is detected in the SDLC data frame, the last valid test word value will be output.
Note
This test word is output on DAC channel #1 or TST-WRD1 (P1.B6 and JP4.14).
DAC Test Word 2
Function:
Provides bus read access to the RS-422 SDLC receive date for DAC test word #2.
Type:
signed binary word (32-bit)
Data Range:
0xF800 to 0x07FF
Read/Write:
R
Initialized Value:
0x0000
Operational Settings:
N/A
Minimum value
F800: -2048 (-10V)
Maximum value
07FF: 2047 (9.995V)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Note
If no test word is transmitted or if an error is detected in the SDLC data frame, the last valid test word value will be output.
Note
This test word is output on DAC channel #2 or TST-WRD2 (P1.C6 and JP4.15).
ADC Control
ADC Test Input
Function:
Provides bus read access to channel 1 of the debug ADC.
Type:
signed binary word (32-bit)
Data Range:
0xF800 to 0x07FF
Read/Write:
R
Initialized Value:
0x0000
Operational Settings:
N/A
Minimum value
F800: -10.24V on the ADC input
Maximum value
07FF: +10.24V on the ADC input
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
ADC Test Input Channels 1-4
Function:
Provides bus read access to channels 1-4 of the debug ADC.
Type:
signed binary word (32-bit)
Data Range:
0xF800 to 0x07FF
Read/Write:
R
Initialized Value:
0x0000
Operational Settings:
N/A
Minimum value
F800: -10.24V on the ADC input
Maximum value
07FF: +10.24V on the ADC input
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Note
ADC Test Input Channel 1 register is the same as ADC Test Input register.
ADC Input Enable
Function:
Enables or disables the ADC input test for either transmission over the RS-422 SDLC interface or injection into the PWM module channel control loop summoning junctions.
Type:
boolean
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
Destination of the ADC input is determined by the ADC Input Destination Select register.
Selects the destination for the ADC Test Input Word.
Type:
other
Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
The available destinations are either RS-422 SDLC interface or the summing junctions of the PWM Channel Loop Controllers. The purpose of this register is to allow lab analysis of the PWM loop controller for verification purposes of the loop characteristics.
ADC Input destination select
0000: ADC input is transmitted over SDLC 5555: ADC input is summed into Ch 1 loop Other: Invalid
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Note
Only channel 1 of the ADC debug input is fed into the summing junction of the current loop. Its value can be read at the ADC Test Input Channel 1 register.
Measurement Registers
Drive Current Measurement
Function:
Contains the measured motor current value.
Type:
signed binary word (32-bit)
Data Range:
0xF800 to 0x07FF
Read/Write:
R
Initialized Value:
0x0000
Operational Settings:
Overflow or underflow values shall be clamped at the maximum positive or negative values.
Minimum value
F800: -10.00A
Maximum value
07FF: +9.995A
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Drive Voltage Measurement
Function:
Contains the measured motor voltage value.
Type:
signed binary word (32-bit)
Data Range:
0xF800 to 0x07FF
Read/Write:
R
Initialized Value:
0x0000
Operational Settings:
Overflow or underflow values shall be clamped at the maximum positive or negative values.
Minimum value
F800: -80.000V
Maximum value
07FF: +79.961V
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Drive Temperature
Function:
Reports the temperature of the output drive stage.
Type:
signed binary word (32-bit)
Data Range:
0x8000 to 0x7FFF
Read/Write:
R
Initialized Value:
0x0000
Operational Settings:
N/A
Minimum value
8000: -32768 ºC
Maximum value
7FFF: +-32767 ºC
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Measured Supply Voltage
Function:
Contains the measured +65V onboard supply voltage value.
Type:
unsigned binary word (32-bit)
Data Range:
0x0000 to 0x07FF
Read/Write:
R
Initialized Value:
0x0000
Operational Settings:
Overflow or underflow values shall be clamped at the maximum positive or negative values.
Minimum value
0000: 0.000V
Maximum value
07FF: +79.961V
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Measured Supply Current
Function:
Contains the measured current of the +65V onboard supply.
Type:
unsigned binary word (32-bit)
Data Range:
0x0000 to 0x0FFF
Read/Write:
R
Initialized Value:
0x0000
Operational Settings:
N/A
Minimum value
0000: 0.000 A
Maximum value
07FF: +65.984 A
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Measured Input Voltage
Function:
Contains the measured voltage of the external supply to the card.
Type:
unsigned binary word (32-bit)
Data Range:
0x0000 to 0x0FFF
Read/Write:
R
Initialized Value:
0x0000
Operational Settings:
N/A
Minimum value
0000: 0.000V
Maximum value
0FFF: +85.369V
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
PS Temperature
Function:
Reports the temperature of the on-board power supply.
Type:
signed binary word (32-bit)
Data Range:
0x8000 to 0x7FFF
Read/Write:
R
Initialized Value:
0x0000
Operational Settings:
N/A
Minimum value
8000: -32768 ºC
Maximum value
7FFF: +-32767 ºC
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
PWM Duty Limit
Function:
Defines the maximum and minimum values the output state PWM duty cycle is saturated to.
Type:
integer
Data Range:
0x0000 to 0x03FF (0 to 1023)
Read/Write:
R/W
Initialized Value:
0x03B6 (950)
Operational Settings:
N/A
Minimum value
0000: 50% low & 50% high
Maximum value
03FF: 0% low and 100% high
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Elapsed Time Counter Hi
Function:
Upper word of the on-board elapsed time counter.
Type:
other
Data Range:
0x0000 to 0xFFFF
Read/Write:
R
Initialized Value:
N/A
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Elapsed Time Counter Lo
Function:
Lower word of the on-board elapsed time counter.
Type:
other
Data Range:
0x0000 to 0xFFFF
Read/Write:
R
Initialized Value:
N/A
Operational Settings:
This register and Elapsed Time Counter Hi represent the total 'on' time of the PWM card.
*This status bit is latched until a reset is performed (Soft Reset or Drive Reset)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
0
0
D
D
D
0
0
D
0
D
D
D
Latched Status Register
Function:
Sticky status bit register.
Type:
other
Data Range:
0x0000 to 0xFFFF
Read/Write:
R
Initialized Value:
0x0000
Note
Same as Status Register (see that register for bit descriptions).
Clear Latched Status Register
Function:
Implements a non-latched reset of the Latched Status Register.
Type:
boolean
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
N/A
Clear latched status register
0000: Inactive + Other: Clear latched status register
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Note
The register will be cleared to its default value after a successful write.
Board Ready
Function:
Reports when the board is ready for communication.
Type:
other
Data Range:
0x0000 or 0xAA55.
Read/Write:
R/W
Initialized Value:
0x0000 (not ready)
Operational Settings:
N/A
Board Ready
0000: Board not ready + AA55: Board ready
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Software Init Done
Function:
Reports when the board software is ready for operation.
Type:
other
Data Range:
0x0000 or 0x0001.
Read/Write:
R
Initialized Value:
0x0000 (not ready)
Operational Settings:
N/A
Board Ready
0000: Not ready + 0001: Ready
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Log Data Register
Function:
Provides fault log data.
Type:
other
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
Register functionality outlined in Appendix.
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Log Control Register
Function:
Provides access to the fault log.
Type:
other
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
Register functionality outlined in Appendix.
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
PWM Configuration Registers
The registers in this section provide information on the PWM configuration, channel configuration, and bus watchdog registers.
PWM Configuration Registers
Mode Select
Function: Selects the definition of the motor drive topology.
Type:
boolean
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
N/A
Mode select
0000: Current mode + Other: Voltage mode
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Command Source Select
Function:
Selects the source of the motor current/voltage commands.
Type:
boolean
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
N/A
Command source select
0000: RS-422 SDLC interface + Other: Bus interface (PCIe or ETH)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Channel Configuration
Current Limit
Function:
Controls the maximum allowable current sourced by the output.
Type:
signed binary word (32-bit)
Data Range:
0x0000 to 0x7FFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
Negative values are latched as a value of zero.
Minimum value
0000: 0.000A
Maximum value
7FFF: 9.995A
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Note
The current limit defaults to 1A to prevent overcurrent faults on the Status Register triggered by noise on the measurement.
Kc Gain
Function:
Specifies the 16-bit input command scaling gain.
Type:
signed binary word (32-bit)
Data Range:
0x8000 to 0x7FFF
Read/Write:
R
Initialized Value:
0x0000
Operational Settings:
N/A
Maximum negative value
8000: -1 (scaling)
Maximum positive value
7FFF: +1 (scaling)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
NOTE The gain is treated as a signed integer. Setting a negative gain value will result in the polarity reversal of the command.
Kg Gain
Function:
Specifies the 16-bit global gain.
Type:
signed binary word (32-bit)
Data Range:
0x8000 to 0x7FFF
Read/Write:
R
Initialized Value:
0x0000
Operational Settings:
N/A
Maximum negative value
8000: -10 (scaling)
Maximum positive value
7FFF: +10 (scaling)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Note
The gain is treated as a signed integer. Setting a negative gain value will result in the polarity reversal of the error term.
Ki Gain
Function:
Specifies the 16-bit integral gain.
Type:
signed binary word (32-bit)
Data Range:
0x8000 to 0x7FFF
Read/Write:
R
Initialized Value:
0x0000
Operational Settings:
N/A
Maximum negative value
8000: -1 (scaling)
Maximum positive value
7FFF: +1 (scaling)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Note
The gain is treated as a signed integer. Setting a negative gain value will result in the polarity reversal of the command.
Note
The integral term is driven by the sample rate of the current measurements:
Kp Gain
Function:
specifies the 16-bit proportional gain.
Type:
signed binary word (32-bit)
Data Range:
0x8000 to 0x7FFF
Read/Write:
R
Initialized Value:
0x0000
Operational Settings:
N/A
Maximum negative value
8000: -2 (scaling)
Maximum positive value
7FFF: +2 (scaling)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Note
The gain is treated as a signed integer. Setting a negative gain value will result in the polarity reversal of the error term.
Bus Watchdog Registers
Bus Watchdog Enable
Function:
Provides enable or disable control of the bus activity watchdog.
Type:
boolean
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
N/A
Bus watchdog enable
FFFF: Enabled + Other: Disabled
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Bus Watchdog Timer Status
Function:
Displays the status of the watchdog timer.
Type:
other
Data Range:
0x1234 or 0xAAAA
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
A watchdog failure condition will latch the failure value. The watchdog fault can be cleared via a power cycle of the card or a toggle of the Bus Watchdog Enable register.
Watchdog timer status
AAAA: Watchdog timeout + 1234: Watchdog disabled or healthy
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Bus Watchdog Period
Function:
Provides the capability to define the watchdog timer interval for a bus activity monitor.
Type:
unsigned binary word (32-bit)
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
If the Status Register is not accessed via successful write within the defined interval, the PWM card shall disable both output channels (regardless of battlefield override state).
Bus watchdog period
0000: 0 milliseconds + FFFF: 250 milliseconds
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
General Control Registers
The registers in this section provide information on the soft reset, battlefield override and power supply control registers.
Soft Reset
Function:
Disables the PWM card's current controller functionality.
Type:
boolean
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
Both the drive PWMs and fault reporting are disabled. During rest, read/writes to the defined registers are still possible.
Soft reset
0000: Reset inactive + Other: Reset active
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Note
Taking the controller OUT of soft reset will set all defined registers to their DEFAULT values.
Battlefield Override
Function:
Used to lockout all fail-safes (except communication watchdogs) within the PWM card.
Type:
boolean
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
When active, intervention of the protection circuitry to shut the drives off to either PWM channel is NOT allowed (except for Watchdog timers). The status of any protection logic is still updated within the Status Register to indicate a failure exists.
Battlefield override
0000: Override inactive + Other: Override active
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Disable PS Over-Temperature Shutdown
Function:
Allows the user to disable the power supply 'over-temperature' protection on the card.
Type:
boolean
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
If a PS over-temperature fault is detected, the drive stage will be disabled.
Allows the user to re-enable the power supply after a fault.
Type:
boolean
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
If a PS Overtemp fault occurs (in Status Register) the on-board PS will shut down unless BATTLEFIELD OVERRIDE or DISABLE_PS_OT_SHUTDOWN is set. This shutdown is a latched condition. Write to the PS_REENABLE register to re enable the PS after a fault.
PS Reenable
0000: Inactive + Other: Re-enable after fault
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Note
The register will be cleared to its default value after a successful write.
PWM Serial Registers
SDLC Edge Select
Function:
Allows the user to select the clock edge used by the RS-422 SDLC serial port.
Type:
boolean
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
Transmit and receive functions will use opposite edges as defined below.
Captures RS-422 SDLC Receive Data Frame CRC errors.
Type:
unsigned binary word (32-bit)
Data Range:
0x0000 to 0xFFFF
Read/Write:
R
Initialized Value:
0x0000
Operational Settings:
Whenever a CRC error is detected within a received data frame this register will increment its value. The maximum value is 65535.
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Note
The counter will stop (and not rollover) when its maximum value is reached. The counter is reset by the SDLC Clear CRC Errors register.
SDLC Total Data Frames
Function:
Captures the number of RS-422 SDLC Receive Data Frames received (valid or invalid).
Type:
unsigned binary word (32-bit)
Data Range:
0x0000 to 0xFFFF
Read/Write:
R
Initialized Value:
0x0000
Operational Settings:
The maximum value is 65535.
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Note
The counter will stop (and not rollover) when its maximum value is reached. The counter is reset by the SDLC Clear Data Frames register.
SDLC Clear CRC Errors
Function:
Clears the RS-422 SDLC CRC error counter in the SDLC Total CRC Errors register.
Type:
boolean
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
While this register is in the inactive state, the error count register is allowed to increment. When the active state is commanded the error count register shall clear its count value to 0000 and refrain from incrementing its error count.
SDLC clear CRC errors
0000: Reset inactive + Other: Reset active
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
SDLC Clear Data Frames
Function:
Clears the number of RS-422 SDLC data frames received in the SDLC Total Data Frames register.
Type:
boolean
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
While this register is in the inactive state, the error count register is allowed to increment. When the active state is commanded the count register shall clear its count value to 0000 and refrain from incrementing its error count.
SDLC clear data frames
0000: Reset inactive + Other: Reset active
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
SDLC Clear Data Frames
Function:
Indicates the status of the last RS-422 SDLC data frame received.
Type:
other
Data Range:
0x0000 or 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
If a data frame is interrupted for any reason, an error indication shall be indicated within this register. This register shall retain the status of the last data frame received until another data frame transmission has completed and new status is available to update this register value.
SDLC last data frame status
FFFF: Error detected on last RS-422 SDLC data frame + 0000: No error detected on last RS-422 SDLC data frame
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Serial Test Registers
SDLC RS422 Test Bits
Function:
Bits to be transmitted in the last Tx SDLC data frame if test bits are enabled.
Type:
other
Data Range:
0x0 to 0xF
Read/Write:
R/W
Initialized Value:
0x0
Operational Settings:
Test bits are enabled via the SDLC Tx Message Configuration register.
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
0
0
0
0
0
0
0
0
0
0
0
0
D
D
D
D
SDLC RS422 Transmit Enable
Function:
Enables SDLC transmission of a frame after receipt of a valid frame.
Configures the behavior of the last byte of the Tx Data Frame.
Type:
boolean
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
The last byte may represent either the test bits defined in the SDLC RS422 Test Bits register or the following Status Register bits.
SDLC Tx message configuration
0000: Test bits + Other: STATUS register bits
Bit(s)
Description
D3
PS overvoltage or undervoltage (Status Register D1 or D0)
D2
'0'
D1
Drive 1 fault (Status Register D13)
D0
Master drive switch status for D0 (Status Register D15)
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
0
0
0
0
0
0
0
0
0
0
0
0
D
D
D
D
Serial Watchdog Registers
SDLC Timeout Period
Function:
Provides the capability to define the watchdog timer interval for a SDLC activity monitor.
Type:
unsigned binary word (32-bit)
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
If a valid data frame is not received within the defined interface, the PWM card shall disable both output channels (regardless of battlefield override state).
SDLC watchdog period
0000: 0 milliseconds + FFFF: 250 milliseconds
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
SDLC Watchdog Timer Enable
Function:
Provides enable or disable control of the RS-422 SDLC activity watchdog.
Type:
Boolean
Data Range:
0x0000 to 0xFFFF
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
N/A
SDLC watchdog timer enable
0000: Watchdog disabled + Other: Watchdog enabled
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
SDLC Watchdog Timer Enable
Function:
Displays the status of the watchdog timer.
Type:
other
Data Range:
0x1234 or 0xAAAA
Read/Write:
R/W
Initialized Value:
0x0000
Operational Settings:
A watchdog failure condition will latch the failure value. The watchdog fault can be cleared via a power cycle of the card or a toggle of the SDLC Watchdog Timer Enable register.
SDLC watchdog timer status
AAAA: Watchdog timeout + 1234: Watchdog disabled or healthy
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Test Registers
Read Only Test Register
Function:
A read-only register used to test the communication link.
Type:
N/A
Data Range:
0x1122 AABB
Read/Write:
R
Initialized Value:
0x1122 AABB
Operational Settings:
N/A
D31
D30
D29
D28
D27
D26
D25
D24
D23
D22
D21
D20
D19
D18
D17
D16
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Read/Write Test Registers
Function:
A read/write register used to test the communication link.
For products capable of 10/100/1000Base-KX functionality - the product Ethernet PHY supports 1000BASE-X. Product interoperability with 10/100/1000BASE-KX is supported with 1000BASE-X (provided that auto-negotiation is disabled).
The Ethernet Interface Option allows communications and control access to all function modules either via the system BUS or Ethernet ports 1 or
2.
Ethernet 1
Ethernet 2
Ethernet 3*
Ethernet 4*
(REF PORT A)
(REF PORT B)
(REF PORT C)
(REF PORT D)
The default IP address:
192.168.1.16
192.168.2.16
192.168.3.16
192.168.4.16
The default subnet:
255.255.255.0
255.255.255.0
255.255.255.0
255.255.255.0
The default gateway:
192.168.1.1
192.168.2.1
192.168.3.1
192.168.4.1
*see Part Number Designation for applicability.
Note
Actual “as shipped” card Ethernet default IP addresses may vary based upon final ATP configuration(s).
The NAI interface supports IPv4 and IPv6 and both the TCP and UDP protocols. The Ethernet Operation Mode Command Listener application
running on the motherboard host processor implements the operation interface. The listener is operational on startup through the nai_MBStartup
process and listen on specific ports for commands to process. The default ports are listed below:
TCP1 - Port 52801
TCP2 - Port 52802
UDP1 - Port 52801
UDP2 - Port 52802
While the listener is active, note that interrupts from the motherboard do not trigger. The listener can be disabled by turning off the
nai_MBStartup process through the Motherboard EEPROM. To turn off nai_MBStartup use the command mbeeprom_util set
MBStartupInitOnlyFlag 1 in the console, either by serial port or telnet to the motherboard, and then reboot the system. To turn on the
nai_MBStartup use the command mbeeprom_util set MBStartupInitOnlyFlag 0 in the console, either by serial port or telnet to the motherboard,
and then reboot the system.
Ethernet Message Framework
The interface uses a specific message framework for all commands and responses. All messages begin with a Preamble code and end with a
Postamble code. The message framework is shown below.
Preamble 2 bytes Always 0xD30F
SequenceNo 2 bytes
Type Code 2 byte
Message Length (2 bytes)
Payload (0..1414 bytes)
Postamble 2 bytes Always 0xF03D
Message Elements
Preamble
The Preamble is used to delineate the beginning of a message frame. The Preamble is always 0xD30F.
SequenceNo
The SequenceNo is used to associate Commands with Responses.
Type Code
Type Codes are used to define the type of Command or Response the message contains.
Message Length
The Message Length is the number of bytes in the complete message frame starting with and including the Preamble and ending with and including the Postamble.
Payload
The Payload contains the unique data that makes up the command or response. Payloads vary based on command type.
Postamble
The Postamble is use to delineate the end of a message frame. The Postamble is always 0xF03D.
Notes
The messaging protocol applies only to card products.
Messaging is managed by the connected (client) computer. The client computer will send a single message and wait for a reply from the card. Multiple cards may be
managed from a single computer, subject to channel and computer capacity.
Board Addressing
The interface provides two main addressing areas: Onboard and Off-board.
Onboard addressing refers to accessing resources located on the board that is implementing the operation interface (including its modules).
Off-board addressing refers to accessing resources located on another board reachable via VME, PCI, or other bus. Off-board addressing
requires a Master/Slave configuration.
The user must always specify if a particular address is Onboard or Off-board. See the command descriptions for the onboard and off-board flags.
Within a particular board (Onboard or Off-board), the address space is broken up into two areas: Motherboard Common Address Space and
Module Address Space. All addresses are 32-bit.
Motherboard Common Address Space starts at 0x00000000 and ends at 0x00004000. This is a 4Kx32-bit address space (16 kbytes).
Module Address Space starts at 0x00004000. Module addressing is dynamically configured at startup. NAI boards support between 1 and 6
modules. The minimum module address space size is 4Kx32 (16 kbytes) and module sizes are always a multiple of 4Kx32.
Module addressing is dynamic and cumulative. The first detected module (starting with Slot 1) is given an address of 0x00004000. The 2nd
detected Module is given an address of:
If no module is detected in a module slot, that slot is not given an address. Therefore, if the first detected Module is in Slot 2, then that module
address will be 0x00004000. If the next detected module is in Slot 4, then the address of that Module will be:
Module addresses are calculated at each board startup when the modules are detected. Therefore, if a module should fail to be
detected due to malfunction or because it was removed from the motherboard, the addresses of the modules that follow it in the
slot sequence will be altered. This is important to note when programming to this interface.
Users can always retrieve the Module Addresses, Module Sizes and Module IDs from the fixed Motherboard Common address area. This data is
set upon each board startup. While the Module Addressing is dynamic, the address where these addresses are stored is fixed. For example, to
find the startup address of the module location in Slot 3, refer to the MB Common Address 0x00000408 from the Motherboard Common
Addresses table that follows.
The 68PW1 3U OpenVPX single-axis PWM servo motor drive is available in one configuration: conduction-cooled. The 68PW1 follows the OpenVPX “Payload Slot Profile” configured as:
Slot profile:
SLT3-PER-2U2U-14.2.17
Module profile:
MOD3-PER-2U2U-16.2.16-1
User I/O is available through the OpenVPX user defined rear I/O connector P1 (see part number and pin-out information).
NOTES
The following notes apply unless otherwise specified:
Front Panel Connectors
Utility Connector JP4
Industry standard mini-HDMI type (type-C receptacle).
Chassis Ground
Rear connector key guides are chassis ground.
Front Panel Utility Connector JP4 (Conduction-Cooled)
The 68PW1 utilizes a Mini-HDMI type card edge connector JP4, available on conduction-cooled configurations that provides the following signals:
Serial (port 1)
Ethernet port 1 (factory configuration option)
ADC debug
DAC debug outputs
TST-WRD1
TST-WRD2
PWM-CMD1 (Drive 1 Current)
NAI also provides an optional “breakout” adapter board (NAI P/N 68PW1-ADPT-ETH-SER-AD-DA) with a mini-HDMI to mini-HDMI type cable. The “breakout” adapter board and a Micro-HDMI cable (NAI P/N 75SBC4-BB) allow for standard I/O connections to Ethernet and asynchronous serial (DB9). Consult the factory for availability.
Asynchronous transmit serial data port 1 (out) / RS232 debug/console port only
SER1-RXD
Asynchronous received serial data port 1 (in) / RS232 debug/console port only
GND
System Ground (return)
Rear I/O VPX Connectors P0-P3 (Conduction-Cooled)
The 68PW1 3U OpenVPX single-axis PWM servo motor drive provides interface via the rear VPX connectors.
Rear I/O Summary
Signals defined as N/C currently have no functionality associated and are not required for general operation.
P0 - Utility plane. Contains the following signal definitions:
Power:
Primary +12V, `3.3_AUX, `/- 12V_AUX and System GND
Geographical Address Pins:
GA0# - GA4#, GAP#
Card reset:
SYSRST# signal
VPX AUX/REF CLK
(Not used)
P1 - Defined as primarily Data/Control Planes (User defined I/O secondary)
High Speed Switched Fabric Interface:
One ultra-thin pipe option (PCIe ver. 2.0 (x1)).
Ethernet:
1000Base-KX
P2 - Motor Drive Output/Power RTN
Input source return Motor power output
P3 - PWM/Drive
+28VDC input source
Rear I/O Utility Plane (P0)
The P0 (Utility) Plane contains the primary power, bus, and utility signals for the OpenVPX board. Additionally, several of the user defined pins can be utilized for Geographical Addressing and a parallel SYSRST# signal. Signals defined as N/C currently have no functionality associated and is not required for general operation.
UTILITY + P0
Row
Row
Row
Row
Row
Row
Row
G
F
E
D
C
B
A
1
(+)12V (VS1_G1)
(+)12V (VS1_F1)
(+)12V (VS1_E1)
N/C (NCD1)
N/C (VS2_C1)
N/C (VS2_B1)
N/C (VS2_A1)
2
(+)12V (VS1_G2)
(+)12V (VS1_F2)
(+)12V (VS1_E2)
N/C (NCD2)
N/C (VS2_C2)
N/C (VS2_B2)
N/C (VS2_A2)
3
(VS3)
(VS3)
(VS3)
N/C (NCD3)
(VS3)
(VS3)
(VS3)
4
(IMPB-SCL-B)
(IMPB-SDA-B)
GND
(-)12V (-12V-AUX)
GND
SYSRST#
NVMRO
5
GAP#
GA4#
GND
(+)3.3V (+3.3V-AUX)
GND
(IMPB-SCL-A)
(IMPB-SDA-A)
6
GA3#
GA2#
GND
(+)12V (+12V-AUX)
GND
GA1#
GA0#
7
N/C (TCK)
GND
N/C (TDO)
N/C (TDI)
GND
N/C (TMS)
N/C (TRST)
8
GND
(REFCLK-25MHz-)
(REFCLK-25MHz+)
GND
(AUX-CLK-)
(AUX-CLK+)
GND
= Motherboard reserved
= Maintenance reserved
Rear I/O Data/Control Planes (P1)
The 68PW1 has the configuration option for specifying a high-speed serial interface fabric bus connection - PCIe ver. 2.0 (x1). As defined in the OpenVPX bridge or payload slot specifications, the 68PW1 requires only one ‘ultra-thin pipe’ (one Tx and one Rx differential pair), which provides additional user I/O definition opportunity. Additionally, the 68PW1 can be commanded/controlled via single port Gig-E (option for 1000Base-KX interface). Additional I/O is also defined on the P1 user defined plane. Signals defined as N/C currently have no functionality associated or are considered optional and are not required for general operation.
Data Plane + P1
Row
Row
Row
Row
Row
Row
Row
G
F
E
D
C
B
A
1
N/C
GND
PCIE-TXN
PCIE-TXP
GND
VPX-PCIE-RXN
VPX-PCIE-RXP
2
GND
N/C
N/C
GND
N/C
N/C
GND
3
N/C (VBAT)
GND
RXDLO-CH1
RXDHI-CH1
GND
TXDLO-CH1
TXDHI-CH1
4
GND
CLKLO-CH1
CLKHI-CH1
GND
DRV-EN-IN
DRV-EN-OUT
GND
5
N/C (SYS_CON)
GND
CTSLO-CH1
CTSHI-CH1
GND
RTSLO-CH1
RTSHI-CH1
6
GND
PWM-CMD2
PWM-CMD1
GND
TST-WRD2
TST-WRD1
GND
7
N/C
GND
AD-CH4N
AD-CH4P
GND
AD-CH3N
AD-CH3P
8
GND
AD-CH2N
AD-CH2P
GND
AD-CH1N
AD-CH1P
GND
9
(SER-RXD1)
GND
S4_ENCB_N-CH1
S2_ENCB_P-CH1
GND
S1_ENCA_N-CH1
S3_ENCA_P-CH1
10
GND
RLO_ENCC_N-CH2
RHI_ENCC_P-CH2
GND
RLO_ENCC_N-CH1
RHI_ENCC_P-CH1
GND
11
(SER-TXD1)
GND
S4_ENCB_N-CH2
S2_ENCB_P-CH2
GND
S1_ENCA_N-CH2
S3_ENCA_P-CH2
12
GND
HALLC_N-CH1
HALLC_P-CH1
GND
REFLO-OUT
REFHI-OUT
GND
13
GND
GND
HALLB_N-CH1
HALLB_P-CH1
GND
HALLA_N-CH1
HALLA_P-CH1
14
GND
N/C
N/C
GND
N/C
N/C
GND
15
N/C (Maskable Reset)
GND
ETH1-TXN
ETH1-TXP
GND
ETH1-RXN
ETH1-RXP
16
GND
GND
GND
GND
GND
GND
GND
= PCIe (x1)
= Drive Enable
= Port 1 / 1000Base-KX (Option)
= ADC
= HALL (Option)
= SYN/RSL & AC Ref (Option)
= PWM
= Maintenance reserved
= Encoder (Option)
= SDLC
= DAC Output
= Motherboard reserved
Motor Drive Output/Power RTN (P2) & PWM/Drive (P3)
The P2/P3 Plane contains the +28 VDC input source and programmable PWM output drive signals for the motor drive.
Data Plane + P2
Row
Row
Row
Row
Row
Row
F
E
D
C
B
A
1
28VIN_RTN*
28VIN_RTN*
28VIN_RTN*
28VIN_RTN*
28VIN_RTN*
28VIN_RTN*
2
PWM-DRV2
PWM-DRV2
PWM-DRV2
PWM-DRV2
PWM-DRV2
PWM-DRV2
3
PWM-DRV1
PWM-DRV1
PWM-DRV1
PWM-DRV1
PWM-DRV1
PWM-DRV1
4
28VIN_RTN
28VIN_RTN
28VIN_RTN
28VIN_RTN
28VIN_RTN
28VIN_RTN
*P2.1 can be configured at factory for either 28V_RTN or PWM-DRV3 for BLDC 3-phase motor designs.
Data Plane + P3
Row
Row
Row
Row
Row
Row
F
E
D
C
B
A
1
28VIN
28VIN
28VIN
28VIN
28VIN
28VIN
2
28VIN
28VIN
28VIN
28VIN
28VIN
28VIN
= 28VIN
= 28VIN_RTN
= PWM-DRV1
= PWM-DRV2
MECHANICAL DETAILS
General - Outline
Note
The following mechanical outline detail example is provided for reference only. Dimensions are in inches unless otherwise specified.
The fault logging system in the PWM card will store, in non-volatile memory, the board’s condition, e.g. current, voltage, and temperature at the time of a fault.
Hardware
The NVM device (FM24CL64B) is a ferroelectric RAM with 64-Kbit of storage, organized as 8K x 8. Each RAM entry is 8 bits wide. There is a total of 8K cells. The FRAM is written and read over an i2c bus.
Logging Information
The following table shows the information that will be logged at the time of a fault. SW will poll the C_ADDR_FAULT_EVENT_FLAG register every 100ms to capture a fault.
Information Logged
Data Bytes
Description
ETC
4
The ETC stores the elapsed time in a non-volatile 32- bit register with quarter second resolution. It can accumulate 298,261 hours, or about 34 years of time. Once the elapsed time register reaches 0xFFFFFFFF, counting stops. It does not roll over. This information is used to differentiate fault events
Status Register
2
The status register gives real-time monitoring of fault bits
Latched Status Register
2
Register used to store which status bits tripped during operation
PS Voltage
2
Measurement of the 65V power supply voltage.
PS Current
2
Measurement of the 65V power supply current.
PS BB1 Temp
2
Measurement of the 65V power supply temperature.
PS BB2 Temp
2
Measurement of the 65V power supply temperature.
Drive 1 Voltage
2
Measurement of the drive voltage.
Drive 2 Voltage
2
Measurement of the drive voltage.
Drive 1 Current
2
Measurement of the drive current.
Drive 2 Current
2
Measurement of the drive current.
Drive Temperature
2
Measurement of the drive temperature.
26 Bytes of data is written to the NVM during a fault. The size of the NVM device determines how many events can be stored.
A total of 150 Fault Events can be stored in NVM at once time. The total number of fault events currently logged is also stored in NVM. Once at full capacity, new entries will overwrite the oldest entries.
Fault Log Access (FPGA REGION = USER INTERFACE)
The access interface is comprised of two parts: a data register and a control register.
Register
Description
Data Register (RO)
Once a request for a fault event is made, data from NVM is written to this register.
Control Register (R/W)
Raytheon will request to read a specific event from NVM by writing to this register. The MSB of this register is defined as a request for event bit. Bits [9:0] represent the event that is being requested. Writing all 0's to bits [9:0] will return the event count (number of faults that occurred) in the data register. The event count will always point to the most recent event. The event count will not exceed 150. Once a count of 150 is read, it is known that the most recent event will always be at 150. After a request, the MSB of the control reg. will be cleared by the PWM card to signify that the data in the data reg. is valid. The following write commands are valid: x8000 = Return event count ` x8001 - x8096= Return data of specified event (1-150). ` xF000 = CLEAR FAULT LOG.
*Requesting an event that has not occurred will result NO NEW DATA. The MSB of the control register will be cleared, but the data register will
not be written to.
**Requesting the same event more than 13 times will continue to return data word 13 of that event.
***Clearing the fault log will reset the event count to 0 by writing all zeros to the “Fault Logging Region “of the NVM.
Example Data Retrieval Scenario (User Side)
The following steps detail the method to retrieve the most recent fault event from NVM.
Write x8000 to the Fault Log Control Register to get the event count.
Read the Fault Log Control Register to ensure the MSB is cleared, indicating
the data in the Fault Log Data Register is valid.
Read the Fault Log Data Register to retrieve the Event Count. In this example assume the Event Count is 2. The Data Register will read
0x0002.
Write to the Control Register x”8002” to begin data acquisition of event #2.
Read the Control Register to ensure MSB is cleared. Expected read is x0002.
Read the Data Register to get a word of Event #2.
Repeat step 4-6 eleven more times to read the FULL fault event.
The following table details how to parse and transform the data from the data register into meaningful information.
Example of Decoding of Data
S T A R T of E V E N T
Word of an Event
Data Register Contents
Data Translation
Definition
1
0002
 Data 1 and Data 2 of an event represent the ETC register. Data 1 is the high word, while data 2 is the low word. Concatenate data 2 to data 1 to retrieve the 32-bit ETC value in Hex. 0002_5020h = 151584_dec Total Elapsed Time 151584 * 0.25 sec = 37896 seconds
Elapsed Time (ETC)
2
5020
Data 1 and Data 2 of an event represent the ETC register. Data 1 is the high word, while data 2 is the low word. Concatenate data 2 to data 1 to retrieve the 32-bit ETC value in Hex. 0002_5020h = 151584_dec Total Elapsed Time 151584 * 0.25 sec = 37896 seconds
 0000h = 0 C
Drive Temperature
E N D of E V E N T
Revision History
Motherboard Manual - 68PW1 Revision History
Revision
Revision Date
Description
C
2023-03-09
ECO C10038, initial release of 68PW1 manual.
C1
2024-05-20
ECO C11549, pg.6, updated block diagram. Pg.6, updated Ancillary I/O bullet (changed 2x A/D to 4x). Pg.6, updated Front/Maintenance I/O bullet (changed 2 D/A to 3 D/A). Pg.7, updated A/D spec(changed 2x A/D to 4x). Pg.7, updated D/A (changed 2 D/A to 3 D/A). Removed ZynqCore/Aux/DDR Voltage register descriptions from Motherboard Monitoring Registers. Pg.24,updated MB Sensor Summary Status register to add PS references; updated Bit table to change voltage/current bits to 'reserved'. Pg.24, updated MB/PS Sensor Registers description to better describe register functionality and to add figure. Pg.25, added 'Exceeded' to threshold bit descriptions. Pg.25-26, removed voltage/current references from sensor descriptions. Pg.30,removed Zynq Core/Aux/DDR Voltage register offsets. Pg.32, updated MB Health MonitoringRegisters offset tables.
DOCS.NAII REVISIONS
Revision Date
Description
2026-05-04
Formatting updates throughout manual (non-technical changes).
NAI Cares
North Atlantic Industries (NAI) is a leading independent supplier of Embedded I/O Boards, Single Board Computers, Rugged Power Supplies, Embedded Systems and Motion Simulation and Measurement Instruments for the Military, Aerospace and Industrial Industries. We accelerate our clients’ time-to-mission with a unique approach based on a Configurable Open Systems Architecture™ (COSA®) that delivers the best of both worlds: custom solutions from standard COTS components.
We have built a reputation by listening to our customers, understanding their needs, and designing, testing and delivering board and system-level products for their most demanding air, land and sea requirements. If you have any applications or questions regarding the use of our products, please contact us for an expedient solution.
Please visit us at: www.naii.com or select one of the following for immediate assistance: